
|
Surveys and data Instruments
Support to other department sections Support Dr. Scient. thesis Contribution to "Scientific infrastructure"
Obsolete, kept for reference
Last update: April 30, 2025, at 08:49 AM |
GPS / GLONASS QC - SYSTEM (Erik G.)Universitetets forskningsfartøy "Håkon Mosby" er utstyrt med flere typer navigasjonssystemer. Systemet som anvendes i forbindelse med datainnsamling er bygget opp av to moduler:
Formålet med de to modulene er å bruke den første dersom det er differensielt korreksjonssignal tilgjengelig, og å bytte til den kombinerte GPS / GLONASS-mottakeren når korreksjonssignalet forsvinner - f.eks. i områdene omkring Svalbard, der IFJ har toktaktivitet. Vi har imidlertid observert uregelmessigheter i posisjoneringen når man er utenfor differensiell dekning og kun benytter den kombinerte GPS / GLONASS-enheten. En av lærlingene utviklet derfor et program for bedre å kunne overvåke kvaliteteten på posisjonsdataene. Programmet fremstiller to typer plott. Det ene er et tidsplott av GPS / GLONASS- mottakerens HDOP1 verdi samt hvilke satellitter (angitt ved SV2-numre) som til enhver tid benyttes i posisjoneringsalgoritmen. Hensikten er her å vise sammenhengen mellom dårlig HDOP-verdi og aktuell satellitt konstellasjon. Det andre plottet er et såkalt "skychart" som indikerer både retning og vinkel til hver benyttet satellitt. Så lenge signalet er sterkt nok vil satellittens bane bli vist som en kurve. Lar man slike banekurver akkumuleres over tid vil det muligens fremtre soner som har lavere kurvetetthet enn øvrige områder. Dette kan indikere en uheldig antenneplassering - f.eks. i radioskyggen av en maststruktur, eller i refleksjonssoner som fartøyets metalloverflater danner. Det forutsettes selvsagt at båten følger samme kurs så lenge datainnsamlingen varer. En annen faktor som kan påvirke navigasjonsutstyret er forstyrrelser fra båtens Inmarsat terminal. Produsenten av GPS / GLONASS-mottakeren opplyser at det kan oppstå "jamming" dersom GPS / GLONASS antennen befinner seg nærmere enn 50 fot fra Inmarsat antennen. De uregelmessighetene vi opprinnelig observerte hadde imidlertid ikke den "av-på" karakteristikken som trolig er typisk for en Inmarsat "jamming" - det var mer tale om en gradvis forringelse av posisjonskvalitet, og deretter en gradvis forbedring. Denne karakteristikken er analog til den periodevise reduksjonen i HDOP kvalitet, som følge av uheldige banekonstellasjoner for de satellittene som ble benyttet. Noter: 1) HDOP: Horizontal Dilution of Precision. Den inverse av volumet av det romlegeme som fremkommer ved å trekke linjer fra mottakeren til de anvendte satellitter. Verdien bør være mindre enn 6. 2) SV: Space Vehicle, nummerering av satellitter. GPS fra 1 til 32, GLONASS fra 33 til 56. 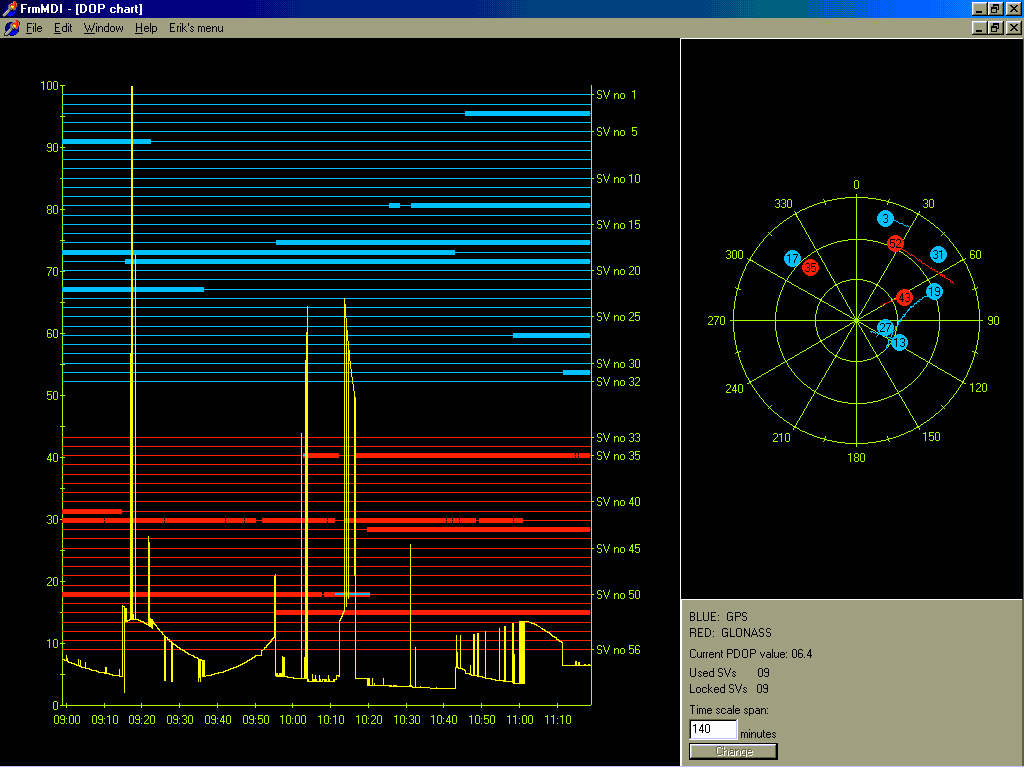 Fig. 1. HDOP (venstre akse, gul kurve) og anvendt SV (høyre akse, blå og rød kurve) som funksjon av tid. Ashtech GG24 mottaker. Forklaringer:
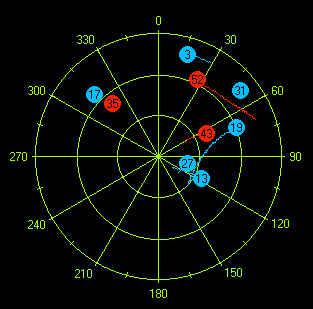 Fig 2. Skychart. Ashtech GG24 mottaker Forklaringer:
|