
|
Surveys and data Instruments
Support to other department sections Support Dr. Scient. thesis Contribution to "Scientific infrastructure"
Obsolete, kept for reference
Last update: April 30, 2025, at 08:49 AM |
INTRODUCTION Key specifications:
LOG 2021-09: REPAIRS, TESTING, NEW GNSS RECEIVER
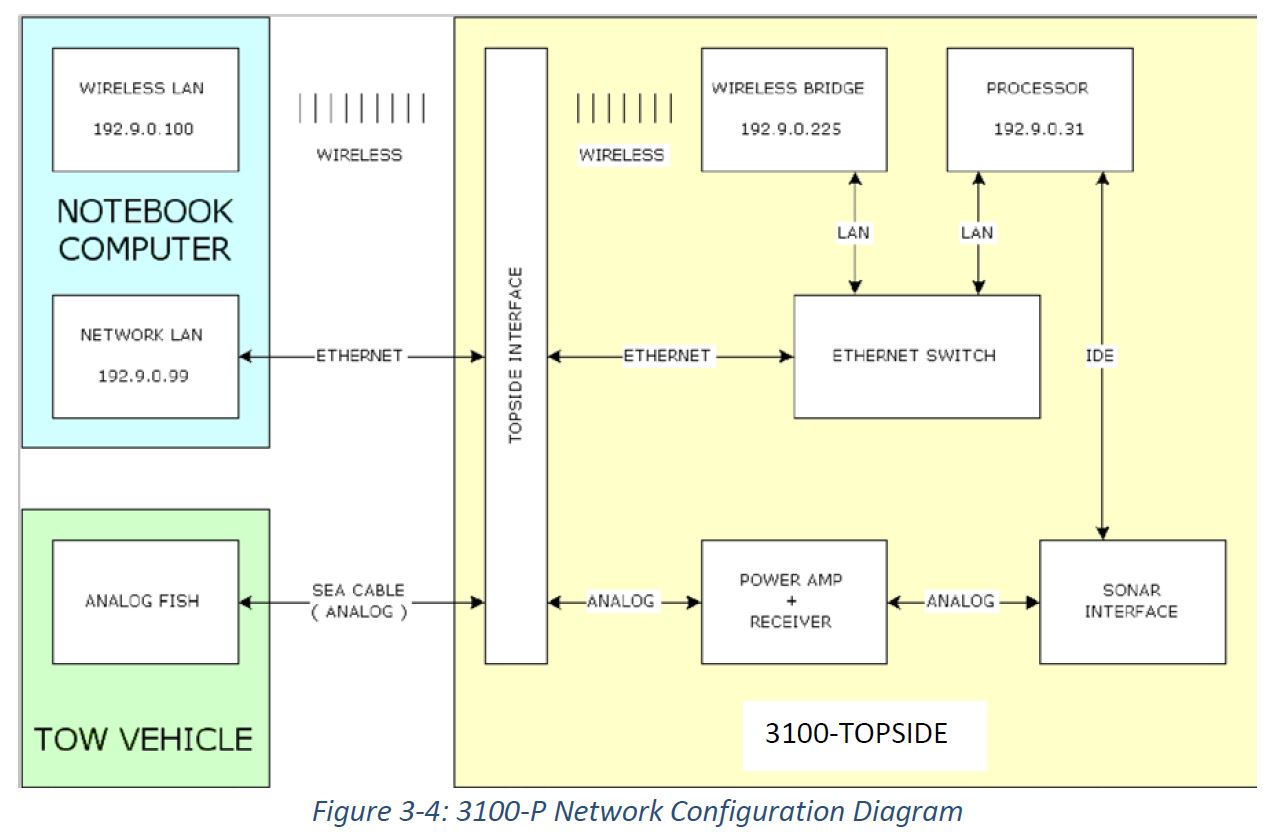
LOG 2025-05: LAPTOPS, SOFTWARE UPGRADES, SYSTEM TESTINGPROBLEM WITH WLAN CONNECTION TO TOPSIDE UNIT FROM WIN10 MACHINES: "It appears that most newer wireless network adapter drivers for Windows 10 do not support the connection type of our older topside wireless access points. There is no fix for this without changing hardware inside the topside. This means you will need a new wireless bridge in your topside. " --- Ref email from manufacturer 24 May, 2019. Configuration
Laptop screen resolutions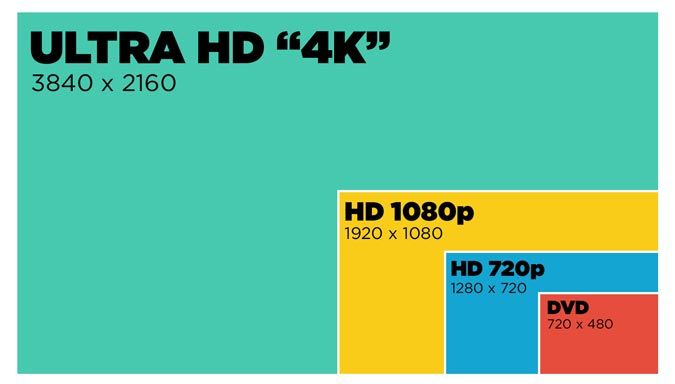 From: https://www.laptopmag.com/articles/laptop-screen-guide Computer Industry Name TV Industry Name 1366 x 768 HD (not Full HD) 1600 x 900 HD+ Resolution of OM laptop 2013 1920 x 1080 Full HD 1080p 1920 x 1200 Offered by Dell Inspiron 9400 ---- back up Chirp Sonar laptop. This resolution seems to be minimum required. 2304 × 1440 Retina (Apple only) 2560 x 1440 QHD / WQHD 2K 2560 × 1600 Retina (Apple only) 2880 × 1800 Retina (Apple only) 3000 x 2000 PixelSense (MS Only) 3200 x 1800 QHD+ 3K 3840 x 2160 UHD 4K Extra monitor:
CONFIGURATION
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Field No. | Field Name and Description | Size | Example |
| 1 | Target/Fix:
| Integer | 0 |
| 2 | Latitude (minutes) | Float | 3684.4210 |
| 3 | Longitude (minutes) | Float | 405.1333 |
| 4 | Course | Integer | 165 |
| 5 | Speed | Integer | 4.0 |
| 6 | Not used | Integer | 0 |
| 7 | Hour (NMEA) | Integer | 23 |
| 8 | Minute (NMEA) | Integer | 59 |
| 9 | Second (NMEA) | Integer | 59 |
| 10 | Reflection coefficient of Seafloor (dB) | Float | -70.9 |
| 11 | Return Number | Integer | 13705 |
| 12 | Fish height above seafloor tracker (meters or ms) | Float | 31.2 |
| 13 | Not used | Integer | 0 |
In addition, nav data gets stored in two places within the JSF file. The raw NMEA message will be stored within the JSF file as a 2002 message. This is the same exact string that is sent from the GPS. The nav data will also be contained within the 80 message (sonar trace data) within the JSF file.
View reflection coefficient display in upper left corner of the display area by dragging the horizontal dividing line:
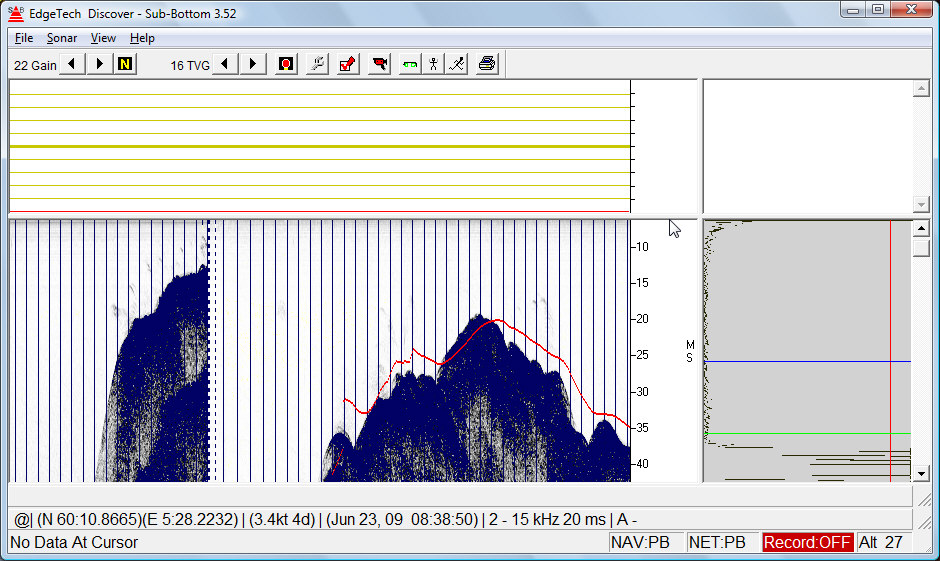
You must enter an offset value (try -40 dB) in the appropriate control control menu.
|
|
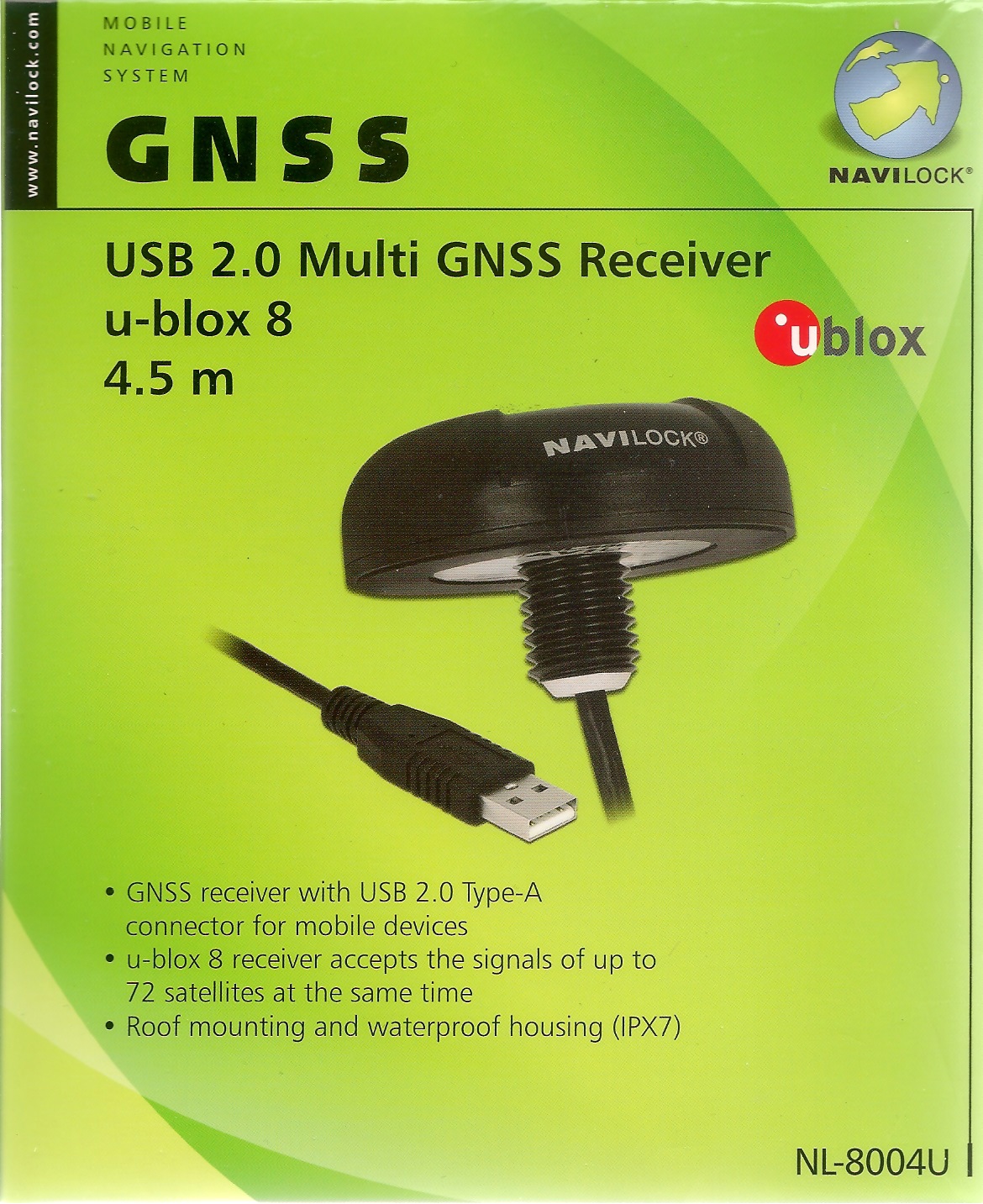
Chipset is u-blox UBX-M8030. References:
| Data sample from Navilock NL-8004U:
1st record, only at the beginning (when opening COM-port): $GNTXT,01,01,02,u-blox AG - www.u-blox.com*4E $GNTXT,01,01,02,HW UBX-M8030 00080000*60 $GNTXT,01,01,02,ROM CORE 3.01 (107888)*2B $GNTXT,01,01,02,FWVER=SPG 3.01*46 $GNTXT,01,01,02,PROTVER=18.00*11 $GNTXT,01,01,02,GPS;GLO;GAL;BDS*77 $GNTXT,01,01,02,SBAS;IMES;QZSS*49 $GNTXT,01,01,02,GNSS OTP=GPS;GLO*37 $GNTXT,01,01,02,LLC=FFFFFFFF-FFFFFFED-FFFFFFFF-FFFFFFFF-FFFFFFE9*50 $GNTXT,01,01,02,ANTSUPERV=AC SD PDoS SR*3E $GNTXT,01,01,02,ANTSTATUS=OK*25 $GNTXT,01,01,02,PF=3FF*4B Subsequent records: $GNRMC,120136.00,A,6023.10268,N,00519.78150,E,0.050,,030320,,,A*62 $GNVTG,,T,,M,0.050,N,0.093,K,A*32 $GNGNS,120136.00,6023.10268,N,00519.78150,E,AA,18,0.73,75.0,43.8,,*53 $GNGGA,120136.00,6023.10268,N,00519.78150,E,1,12,0.73,75.0,M,43.8,M,,*73 $GNGSA,A,3,24,17,19,12,15,10,28,20,01,13,,,1.87,0.73,1.72*17 $GNGSA,A,3,75,66,74,84,76,83,67,85,,,,,1.87,0.73,1.72*19 $GPGSV,3,1,12,01,14,011,40,10,25,282,27,12,38,217,25,13,07,153,09*73 $GPGSV,3,2,12,15,26,178,10,17,40,070,41,19,41,102,27,20,10,253,11*78 $GPGSV,3,3,12,24,78,225,21,25,06,230,21,28,16,057,42,32,19,314,06*76 $GLGSV,3,1,10,65,26,211,,66,49,293,25,67,15,342,34,74,33,075,39*6D $GLGSV,3,2,10,75,84,306,21,76,32,262,16,83,19,006,27,84,36,070,37*66 $GLGSV,3,3,10,85,12,126,20,,,,46*5F $GNGLL,6023.10268,N,00519.78150,E,120136.00,A,A*7C $GNGST,120136.00,3326643,,,,4.1,1.9,7.2*73 $GNZDA,120136.00,03,03,2020,00,00*7F $GNRMC,120137.00,A,6023.10269,N,00519.78144,E,0.061,,030320,,,A*65 $GNVTG,,T,,M,0.061,N,0.113,K,A*39 $GNGNS,120137.00,6023.10269,N,00519.78144,E,AA,16,1.11,74.9,43.8,,*55 $GNGGA,120137.00,6023.10269,N,00519.78144,E,1,12,1.11,74.9,M,43.8,M,,*7B $GNGSA,A,3,24,17,19,12,10,28,01,13,,,,,2.82,1.11,2.60*12 $GNGSA,A,3,75,66,74,84,76,83,67,85,,,,,2.82,1.11,2.60*1A $GPGSV,3,1,12,01,14,011,40,10,25,282,27,12,38,217,25,13,07,153,10*7B $GPGSV,3,2,12,15,26,178,07,17,40,070,41,19,41,102,26,20,10,253,09*76 $GPGSV,3,3,12,24,78,225,22,25,06,230,21,28,16,057,42,32,19,314,12*70 $GLGSV,3,1,10,65,26,211,,66,49,293,26,67,15,342,34,74,33,075,39*6E $GLGSV,3,2,10,75,84,306,19,76,32,262,18,83,19,006,27,84,36,070,37*63 $GLGSV,3,3,10,85,12,126,21,,,,46*5E $GNGLL,6023.10269,N,00519.78144,E,120137.00,A,A*79 $GNGST,120137.00,24,,,,4.1,1.9,7.1*42 $GNZDA,120137.00,03,03,2020,00,00*7E $GNRMC,120138.00,A,6023.10270,N,00519.78142,E,0.053,,030320,,,A*65 $GNVTG,,T,,M,0.053,N,0.098,K,A*3A $GNGNS,120138.00,6023.10270,N,00519.78142,E,AA,17,0.79,74.8,43.8,,*5B $GNGGA,120138.00,6023.10270,N,00519.78142,E,1,12,0.79,74.8,M,43.8,M,,*74 $GNGSA,A,3,24,17,19,12,15,10,28,01,13,,,,2.17,0.79,2.02*11 $GNGSA,A,3,75,66,74,84,76,83,67,85,,,,,2.17,0.79,2.02*1D $GPGSV,3,1,12,01,14,011,40,10,25,282,27,12,38,217,25,13,07,153,12*79 $GPGSV,3,2,12,15,26,178,12,17,40,070,41,19,41,102,25,20,10,253,08*70 $GPGSV,3,3,12,24,78,225,22,25,06,230,21,28,16,057,42,32,19,314,07*74 $GLGSV,3,1,10,65,26,211,,66,49,293,26,67,15,342,34,74,33,075,39*6E $GLGSV,3,2,10,75,84,306,16,76,32,262,20,83,19,006,27,84,36,070,36*66 $GLGSV,3,3,10,85,12,126,21,,,,45*5D $GNGLL,6023.10270,N,00519.78142,E,120138.00,A,A*78 $GNGST,120138.00,443098,,,,4.0,1.9,7.1*48 $GNZDA,120138.00,03,03,2020,00,00*71 | RMC -- Recommended Minimum Data Example: $GNRMC,120136.00,A,6023.10268,N,00519.78150,E,0.050,,030320,,,A*62
$xxRMC,time,status,lat,NS,lon,EW,spd,cog,date,mv,mvEW,posMode,navStatus*cs<CR><LF>
where:
status: V = Data invalid, A = Data valid
spd: Speed over ground [knots]
cog: Course over ground [degrees]
mv: Magnetic variation value. Only supported in ADR 4.10 and later
mvEW: Magnetic variation E/W indicator. Only in ADR 4.10 and later
posMode: Mode Indicator
N = No fix
E = Estimated/Dead reckoning fix
A = Autonomous GNSS fix
D = Differential GNSS fix
F = RTK float
R = RTK fixed
navStatus: Navigational status indicator
V = Equipment is not providing navigational status information,
fixed field, only available in NMEA 4.10 and later
|
| GNS -- GNSS fix data Example: $GNGNS,120136.00,6023.10268,N,00519.78150,E,AA,18,0.73,75.0,43.8,,*53
$xxGNS,time,lat,NS,lon,EW,posMode,numSV,HDOP,alt,sep,diffAge,diffStation,navStatus*cs<CR><LF>
where:
posMode: Positioning mode, see position fix flags description.
1st character for GPS, 2nd character for GLONASS,
3rd character for Galileo, 4th character for BeiDou
alt: Altitude above mean sea level
sep: Geoid separation: difference between ellipsoid and mean sea level
diffAge: Age of diff corrections [seconds], null when DGPS is not used
diffStation: ID of station providing diff corrections, null when DGPS is not used
navStatus: Navigational status indicator
V (Equipment is not providing navigational status information,
fixed field, only available in NMEA 4.10 and later)
| |
| GGA -- Global positioning system fix data Example: $GNGGA,120136.00,6023.10268,N,00519.78150,E,1,12,0.73,75.0,M,43.8,M,,*73 The NMEA specification indicates that the GGA message is GPS specific. However, when the receiver is configured for multi-GNSS, the GGA message contents will be generated from the multi-GNSS solution. For multi-GNSS use, it is recommended that the NMEA-GNS message is used instead.
$xxGGA,time,lat,NS,lon,EW,quality,numSV,HDOP,alt,altUnit,sep,sepUnit,diffAge,diffStation*cs<CR><LF>
where:
quality: Quality indicator for position fix, see position fix flags description [1]
0 = No fix
1 = Autonomous GNSS fix
2 = Differential GNSS fix
4 = RTK fixed
5 = RTK float
6 = Estimated/Dead reckoning fix
| |
| GSA -- GNSS DOP and Active Satellites Example: $GNGSA,A,3,24,17,19,12,15,10,28,20,01,13,,,1.87,0.73,1.72*17
$xxGSA,opMode,navMode{,svid},PDOP,HDOP,VDOP,systemId*cs<CR><LF>
where:
opMode: Operation mode:
M = Manually set to operate in 2D or 3D mode
A = Automatically switching between 2D or 3D mode
navMode: Navigation mode, see position fix flags description [1]
Possible values for navMode:
1 = No fix
2 = 2D fix
3 = 3D fix
svid: Space Vehicle ID - Start of repeated block (12 times)
PDOP: Position dilution of precision
HDOP: Horizontal dilution of precision
VDOP: Vertical dilution of precision
systemId: NMEA defined GNSS System ID, see Signal Identifiers table [2]
Only available in NMEA 4.10 and later
| |
| GST -- GNSS Pseudo Range Error Statistics Example: $GNGST,120136.00,3326643,,,,4.1,1.9,7.2*73 This message reports statistical information on the quality of the position solution. $xxGST,time,rangeRms,stdMajor,stdMinor,orient,stdLat,stdLong,stdAlt*cs<CR><LF> where: rangeRms: RMS value of the standard deviation of the ranges [meter] stdMajor: Standard deviation of semi-major axis (only in ADR 4.10 and later) stdMinor: Standard deviation of semi-minor axis (only in ADR 4.10 and later) orient: Orientation of semi-major axis (only in ADR 4.10 and later) stdLat: Standard deviation of latitude error [meter] stdLong: Standard deviation of longitude error [meter] stdAlt: Standard deviation of altitude error [meter] | |
| ZDA -- Time and Date Example: $GNZDA,120136.00,03,03,2020,00,00*7F $xxZDA,time,day,month,year,ltzh,ltzn*cs<CR><LF> where: ltzh: Local time zone hours: 00 (fixed field) ltzn: Local time zone minutes: 00 (fixed field) |
[1] Position fix flags description
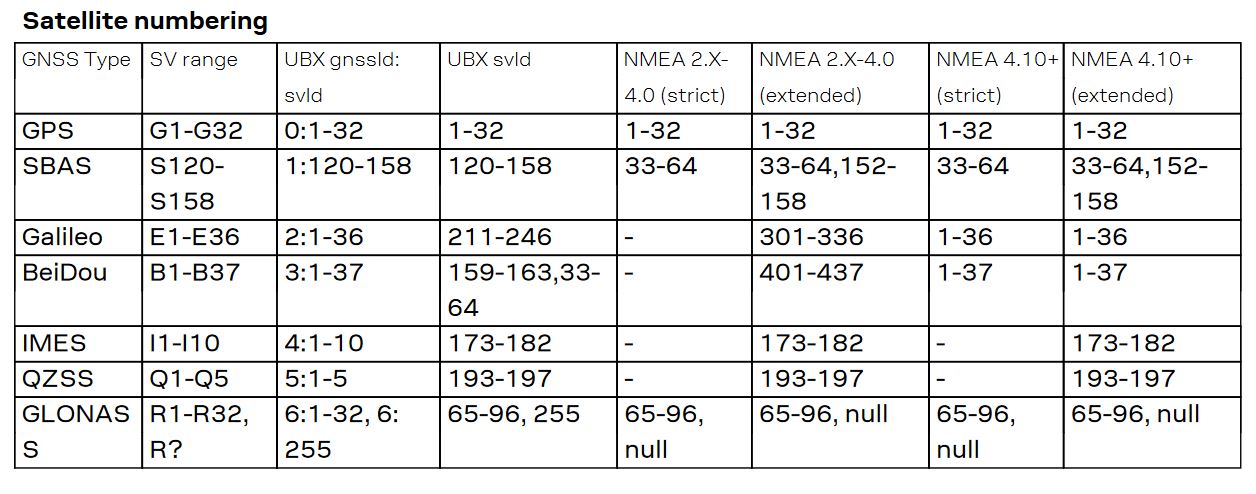
[2] Signal Identifiers table

This unit appears as a COM-device. Since there are many new types of NMEA telegrams - and we are not sure if all telegram types output GNSS-quality data, we should split the GPS data stream and direct one for logging to disk, and the other to Chirp Sonar program. In that way we can post-process all raw navigation data - not only the (possible) sub-set that Chirp Sonar program deals with. (Many uncertain factors here !!)
Basic Specifications:
NMEA protocol output V.3.01:
Description of NMEA telegrams: MT3333 Platform NMEA Message Specification For GPS+GLONASS_V1.00 (PDF) ---- also local copy
| Message ID | Meaning | Rate |
|---|---|---|
| GPGGA | Global Positioning System Fixed Data | 1time/1sec |
| GPRMC ~ GNRMC | Recommended Minimum Specific GNSS Data | 1time/1sec |
| GPVTG | Course Over Ground and Ground Speed | 1time/1sec |
| GPGSA | GNSS DOP and Active Satellites | 1time/5sec |
| GPGSA | GNSS DOP and Active Satellites | 2time/5sec |
| GPGSV / GLGSV | GNSS Satellites in View | 1time/5sec |
$GPGGA,142930.000,6023.0842,N,00519.7589,E,1,13,0.99,16.4,M,43.7,M,,*57 $GNRMC,142930.000,A,6023.0842,N,00519.7589,E,0.00,69.75,050618,,,A*4D $GPVTG,69.75,T,,M,0.00,N,0.00,K,A*00 $GPGGA,142931.000,6023.0842,N,00519.7589,E,1,13,0.99,16.4,M,43.7,M,,*56 $GNRMC,142931.000,A,6023.0842,N,00519.7589,E,0.00,69.75,050618,,,A*4C $GPVTG,69.75,T,,M,0.00,N,0.00,K,A*00 $GPGGA,142932.000,6023.0842,N,00519.7589,E,1,13,0.99,16.4,M,43.7,M,,*55 $GNGSA,A,3,26,05,07,29,21,27,,,,,,,1.83,0.99,1.54*1D $GNGSA,A,3,66,72,82,80,81,65,73,,,,,,1.83,0.99,1.54*1F $GPGSV,3,1,10,21,68,134,26,16,67,261,18,26,60,187,19,27,33,266,23*7D $GPGSV,3,2,10,29,23,090,37,20,22,141,,05,14,026,46,07,10,340,40*7B $GPGSV,3,3,10,09,03,311,18,38,,,*43 $GLGSV,3,1,10,82,68,255,26,80,56,237,16,81,55,062,24,73,34,322,30*66 $GLGSV,3,2,10,65,28,035,39,66,17,097,37,83,16,247,,72,11,350,34*65 $GLGSV,3,3,10,79,11,182,17,88,07,065,*63 $GNRMC,142932.000,A,6023.0842,N,00519.7589,E,0.00,69.75,050618,,,A*4F $GPVTG,69.75,T,,M,0.00,N,0.00,K,A*00 $GPGGA,142933.000,6023.0842,N,00519.7589,E,1,13,0.99,16.4,M,43.7,M,,*54 $GNRMC,142933.000,A,6023.0842,N,00519.7589,E,0.00,69.75,050618,,,A*4E $GPVTG,69.75,T,,M,0.00,N,0.00,K,A*00 $GPGGA,142934.000,6023.0842,N,00519.7589,E,1,13,0.99,16.4,M,43.7,M,,*53 $GNRMC,142934.000,A,6023.0842,N,00519.7589,E,0.00,69.75,050618,,,A*49 $GPVTG,69.75,T,,M,0.00,N,0.00,K,A*00 $GPGGA,142935.000,6023.0842,N,00519.7589,E,1,13,0.99,16.4,M,43.7,M,,*52 $GNRMC,142935.000,A,6023.0842,N,00519.7589,E,0.00,69.75,050618,,,A*48 $GPVTG,69.75,T,,M,0.00,N,0.00,K,A*00
The USB cable junction needs protection from the elements. Earlier we have used heat-shrink tube lined with glue - but then it will not be possible to disassemble the stuff. So this time we purchased a junction box that might be a bit over-sized, but in practice that is not a problem: Jula P/N: 402298
The box is rated IP44, where second digit indicates ingress protection:


Furuno GP-32 GPS / Chart Plotter | 
JRC model JLR-21 GPS Compass |
RV "Brattstrøm" is furnished with following navigation equipment:
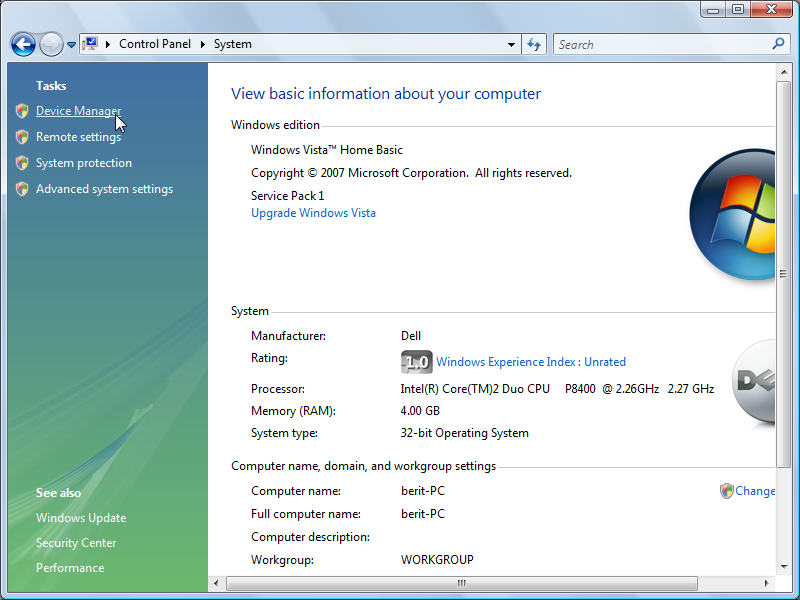
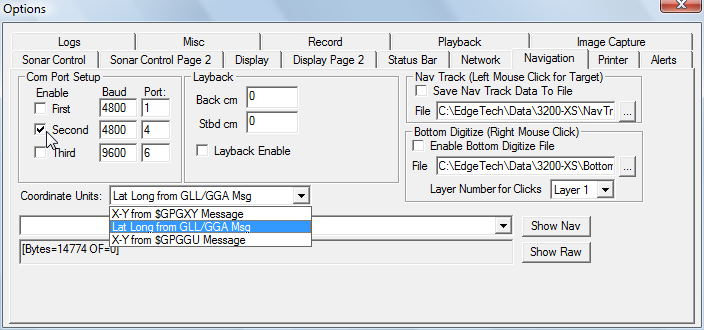
When the GPS is attached to the computer via an USB port, you must determine which COM port the operating system assigned to the device (it can vary). You will later use this COM port information in the EDGETECH topside box control program, in order to activate GPS input to the software.
First select Start -> Control Panel, and then click DEVICE MANAGER, as shown below:
Then click on Ports (COM & LPT):
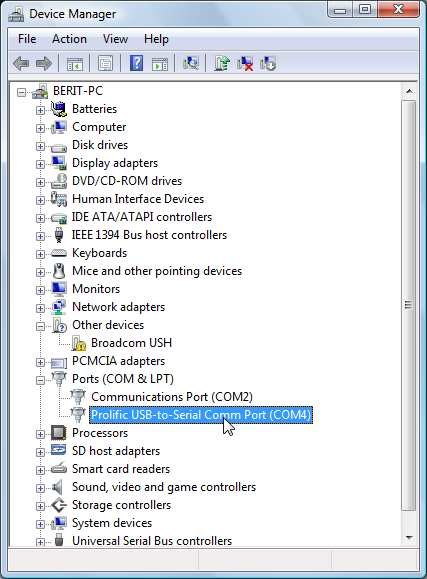
The GPS device is designated "PROLIFIC USB-TO-SERIAL COMM PORT". In this example, the operating system assigned Keep('COM4') to this device.
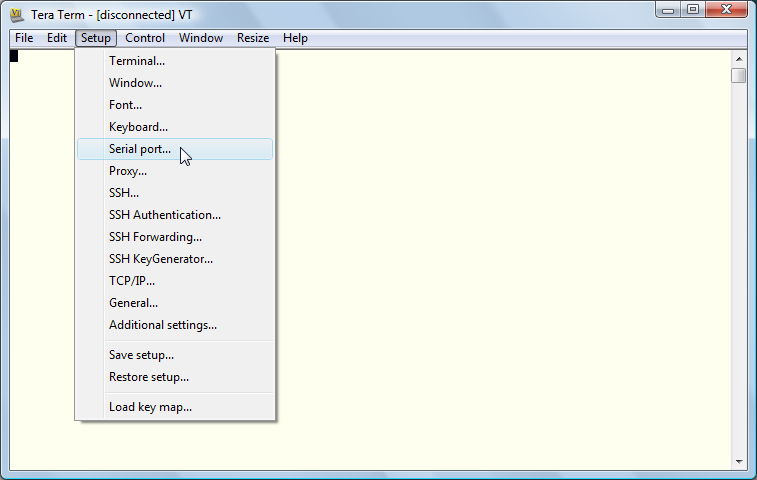
We use TeraTerm terminal program in this example. You can also use Window's own terminal program (HyperTerminal).
It's also prudent to verify correct operation of the GPS. Do that before you enable the GPS in the EDGETECH software.
Execute the TeraTerm terminal software. Select Setup -> Serial port:
Use COM port discovered in Control Panel, and set speed to 4800 b/s:
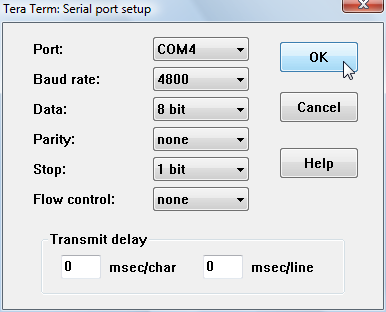
If the GPS works properly, you should see something like this (2011):
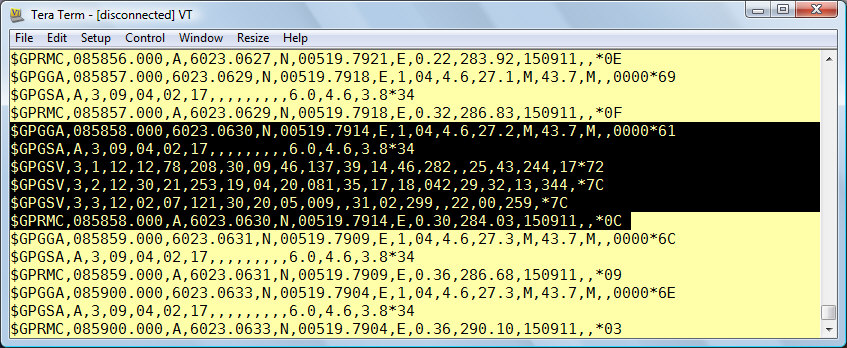
Then close the terminal program (or select File -> Disconnect). You are about to enable the GPS serial port in the EDGETECH software, and you cannot gave the same COM-port open in two programs (unless you have installed special software for that purpose, like Franson GpsGate).
It is most practical to use GNSS ("Global Navigation Satellite System") correction services provided by the Norwegian Mapping Authority. Their correction signals are received through internet connection. A roving GNSS receiver can then use GSM (or GPRS) mobile broadband. The receiver must also feed NMEA GGA-telegrams back, so the system can determine which of the fixed reference stations in the national network is most appropriate to base correction data on.
Many GNSS receivers have serial data RS232C interface. The serial port that is designated to receive correction data, can often also emit the required NMEA GGA telegram, thus only a single serial port must be interfaced to the internet.
The Norwegian Mapping Authority provides two types of GNSS correction services:
The accuracy provided by DPOS service is sufficient for geolocating marine seismic data that we collect.
| DPOS : Decimeter accuracy - preferred | CPOS : Centimeter accuracy |
|
|
| DPOS Receiver requirements | CPOS Receiver requirements |
|
|

Quoting from this source:
set devmgr_show_nonpresent_devices=1 (which is the magic command to show ghost devices) followed by start devmgmt.msc (which starts up the device manager).
| Step # | Description | Screenshot |
| 1 | On client Windows PC, click on lower left magnifying glass. Enter "software" in search field | 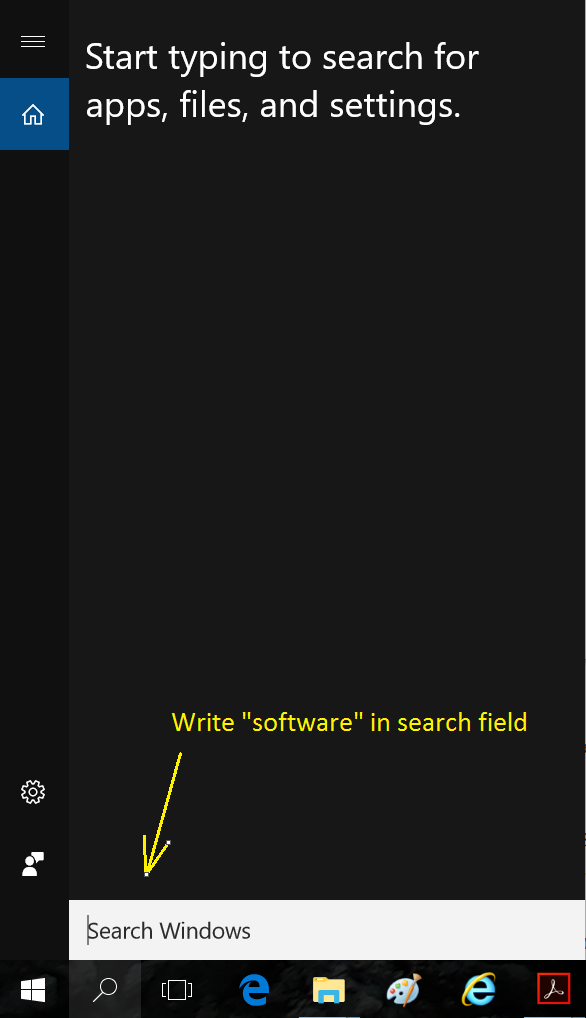
|
| 2 | Select "Software Center" program that appears | 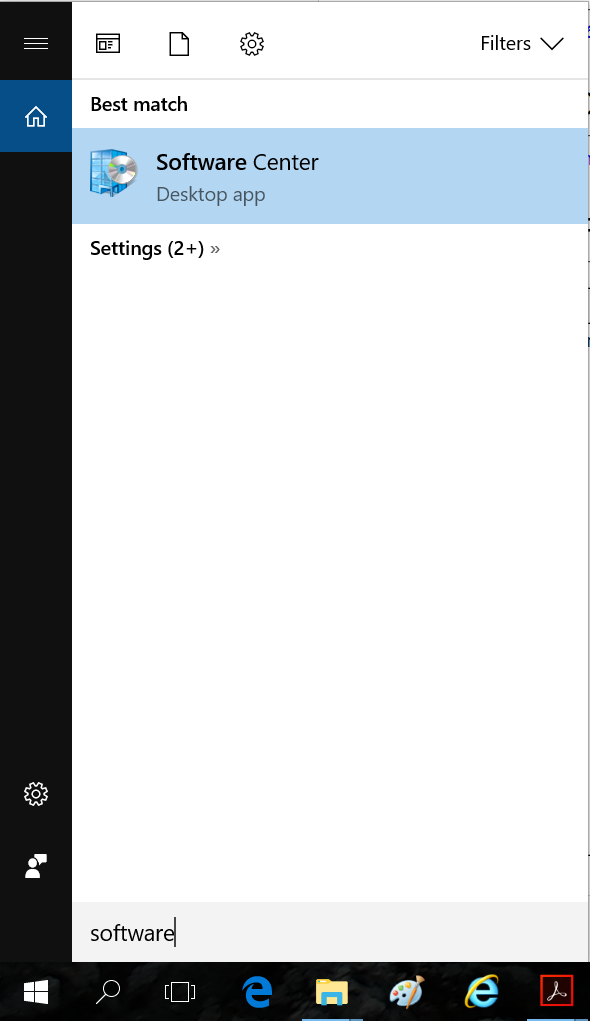
|
| 3 | Scroll down to Python and install. Select Python version 2.7.x | 
|
| 4 | Open terminal window and confirm that Python is installed on your computer. By convention, Python 2.7.x will be installed in local directory: c:\Python27. Since there is no PATH to that folder (unless you set environment variable), you have to specify the complete path to Python, when you want to invoke it. | 
|
| 5 | If Python works fine, you should see similar display as screen shot to the right. Exit by typing exit(). | 
|
| 6 | Now make a new working directory for processing nav data, and download raw data files and Python script (ref next section). In this example, folder is:
O:\www\Edgetech-Chirp-Sonar\DATA\2017\2017-July-Haflidi\nav-data-processing | 
|
| 7 | Execute Python script - and redirect output to file called 'test.txt" using command:
c:\Python27\python.exe Chirp-navdata-2017-processing-no-1.py > test.txt | 
|
Use these nav data from June 2017 survey as example. They are copied from survey's web page:
| No. | Folder on recording laptop1) | Input file | File time stamp | Script | Output file | Map sample |
| 1 | C:\DATA\2017-JUNE\HB17-211 | navtrack.dat001.nav | 20.06.2017, 14:22:36 | Chirp-navdata-2017-processing-no-1.py | navtrack.dat001.nav.txt | Link |
| 2 | C:\DATA\2017-JUNE\ | navtrack.dat002.nav | 22.06.2017, 07:51:30 | Chirp-navdata-2017-processing-no-2.py | navtrack.dat002.nav.txt | Link |
| 1) Recording laptop: Dell Inspiron 9400, S/N: | ||||||
| EDGETECH CHIRP SONAR: TEST / UPGRADE LOG, SEPTEMBER 2016 | ||||
| Test # | Sub-item | Description | Result | Remarks |
| 1 | LAPTOP, PRIMARY: DELL Latitude E6400 ATG:
| |||
| 1.1 | Microsoft Security Essentials:
| OK | - | |
| 1.2 | Microsoft Update | FAIL | Microsoft Update program does not get any updates - appears to be getting no response from Microsoft update server - but the other machine (running Vista Business) updated successfully (took very long time, though). | |
| 1.3 | FIX for Microsoft Update problem | OK | Download "WSUS Offline Update" from here: http://www.wsusoffline.net/docs/. First execute main program, then client program. Worked fine! | |
| 1.4 | Update Edgetech Discovery software: Version installed = 4.09, and that is the latest as of 5 September 2016. (If update required, download from Edgetech Resource Center - "Discover Software Available for Download". Remove existing program version first [Start -> Control Panel -> Programs and Features]). | NOT REQUIRED | - | |
| 2 | LAPTOP, BACKUP: DELL Inspiron 9400
| |||
| 2.1 | Microsoft Security Essentials:
| OK | - | |
| 2.2 | Microsoft Update | OK | - | |
| 2.3 | Update Edgetech Discovery software:
| OK | Select "3200 Software" | |
| 3 | SYSTEM TEST - using both primary and backup laptops
Needed:
| |||
| 3.1 | Towfish functional test (limit Power Level to 10%) | OK | - | |
| 3.2 | GPS test | OK | - | |
| 3.3 | Recording test | OK | Only seen that *.JSF files are generated - content not examined. | |
For the first time since we received the Edgetech Chirp Sonar system in 2008, is was deployed without prior system check-out. Main laptop (DELL Latitude E6400 ATG) DOA ("dead on arrival"). Here's repair report from our excellent IT support staff (ØN):
1) Machine: DELL Latitude E6400 ATG 2) Laptop had not been used since September 2015 ⇒ internal battery depleted ⇒ BIOS date/clock had to be set. 3) Installed new BIOS version. 4) Inside BIOS setup, HDD controller was in incorrect mode so HDD performance was poor. Fixed.
Correct setting : Mode = AHCI ("Advanced Host Controller Interface") 5) Outdated network driver caused machine to freeze after log in. Driver updated ⇒ problem fixed.
Machine: DELL Latitude E6400 ATG:
Applies to both primary and back-up laptops:
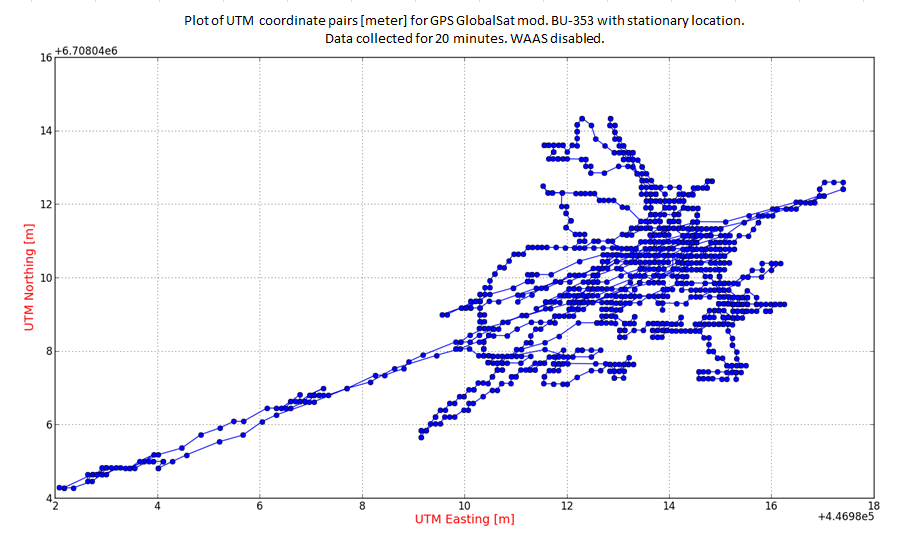
Part of description of new GNSS development, excerpt from email 15 Feb 2018:
''..... det er ganske forstemmende å se hvilken posisjonsnøyaktighet en standard GPS-mottaker gir (ref denne figuren). Fabrikantene av enklere GPS-mottakere forsøker nå å skjule dette kjedelige faktum når oppgraderte produkter presenteres, ved å utelate spesifikasjonen som angår horisontal nøyaktighet når man IKKE har korreksjonsdata; i stedet oppgir de denne nøyaktigheten med litt kryptisk forbehold: "SBAS enable" - se figur 2 under. Dette er intet problem når man har kunnskap om de tekniske forhold som ligger bak. Så langt har det kun vært sensitiviteten som er forbedret - dvs mottakerens evne til å først finne GPS-signalet, og deretter følge det (dvs det er to slike spesifikasjoner; "tracking sensitivity" som vanligvis oppgis, og den er bedre enn den som trengs for å identifisere signalet i første omgang, kalt "acquisition sesnsitivity" ) - som gir en forbedret mulighet for å bruke GPS-mottakerne i "urban jungle", og med mye overdekning i form av "dense foliage".
Det nye nå er at chip-settene som brukes i rimelige satellitt-mottakere også kan behandle signaler fra GLONASS (det Russiske systemet), Galileo (det Europeiske) og BeiDou-2 (det Kinesiske), og dermed forbedre posisjonsnøyaktigheten mye for en helt frittstående mottaker (uten korreksjon). Men utviklingen er i en tidlig fase, og det er kun en av de fem dominerende chip-sett-fabrikantene som har signalisert at de kan fremstille kretser som kan behandle signaler fra alle de nevnte satellittsystemene (QTI med SiRFstarV 5e). Men bare det å kunne kombinere GPS og GLONASS vil øke nøyaktigheten mye. Og slike enheter skal finnes på markedet:
Vi burde anskaffe Holux M-215+ og BU353-W10 for å se om de levde opp til forventningene (kan kjøpe fra Amazon og få beløpet refundert - ikke funnet norske forhandlere så langt). Siden det er endel tid før Chirp sonar'n skal benyttes så bør dette gå bra.
New NMEA telegrams: GNRMC, GNGSA, GLGSV
This is a very problematic receiver. It does not appear as a COM-port, but as a special device. So we cannot get a serial stream, as our chirp sonar software expects.
GlobalSat mod. BU-353 does not work with Win10 (new primary laptop). So we have to purchase new GPS units (USB versions). Here are the alternatives.
NOTE: When you plug GPS 18x USB into computer running Win10, the operating system will get drivers from proper source. After some time, the unit appears as GARMIN device with Setup > Devices. So another piece of software is required - GpsGate Splitter from GpsGate. Download and install. Then data from GPS 18x USB will appear as virtual COM ports (by default, Keep('COM1')-4), which means many applications can simultaneously utilize the same data source. Very good.


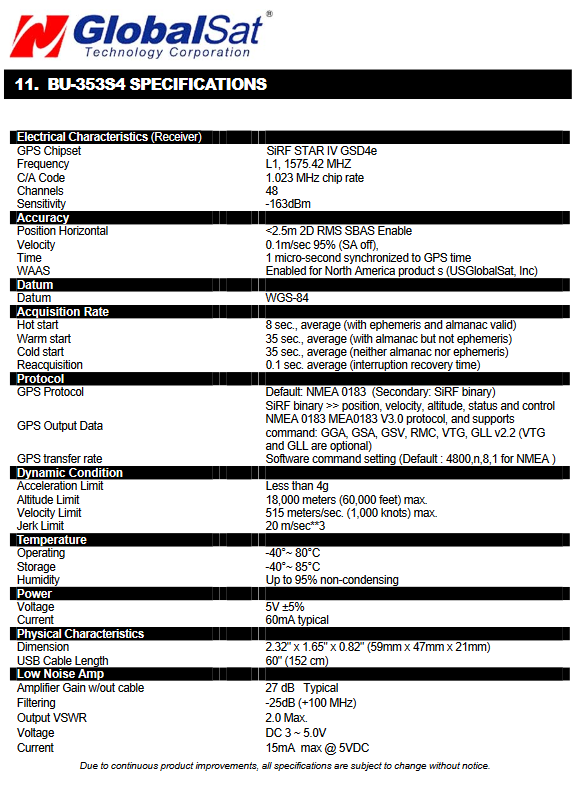
BU-353 specifications, from BU-353 "User's Guide" ver 2.3.
Download latest SiRFDemo.exe software from www.stargps.ca

SirfDemo test of GPS BU-353. Slecet first Data Source -> Activate source. Change to NMEA-mode by choosing Action -> Switch to NMEA mode (if the GPS was in binary mode for some reason).
Example of NMEA telegrams sent by the BU-353. Notice how the $GPGGA, $GPGSA, $GPRMC telegrams appear every second, wheras the $GPGSV is transmitted at a lower rate.
$GPGGA,101413.000,6023.0592,N,00519.8374,E,1,06,1.7,106.8,M,43.7,M,,0000*59 $GPGSA,A,3,27,09,04,02,12,32,,,,,,,2.5,1.7,1.9*33 $GPRMC,101413.000,A,6023.0592,N,00519.8374,E,0.38,103.66,160910,,*0F $GPGGA,101414.000,6023.0591,N,00519.8385,E,1,06,1.7,108.2,M,43.7,M,,0000*57 $GPGSA,A,3,27,09,04,02,12,32,,,,,,,2.5,1.7,1.9*33 $GPRMC,101414.000,A,6023.0591,N,00519.8385,E,0.36,92.12,160910,,*31 $GPGGA,101415.000,6023.0590,N,00519.8392,E,1,06,1.7,109.0,M,43.7,M,,0000*52 $GPGSA,A,3,27,09,04,02,12,32,,,,,,,2.5,1.7,1.9*33 $GPRMC,101415.000,A,6023.0590,N,00519.8392,E,0.36,102.72,160910,,*09 $GPGGA,101416.000,6023.0589,N,00519.8398,E,1,06,1.7,109.8,M,43.7,M,,0000*5B $GPGSA,A,3,27,09,04,02,12,32,,,,,,,2.5,1.7,1.9*33 $GPRMC,101416.000,A,6023.0589,N,00519.8398,E,0.30,95.22,160910,,*34 $GPGGA,101417.000,6023.0589,N,00519.8401,E,1,06,1.7,110.2,M,43.7,M,,0000*5F $GPGSA,A,3,27,09,04,02,12,32,,,,,,,2.5,1.7,1.9*33 $GPGSV,3,1,12,12,81,136,31,25,56,245,,30,51,248,,14,45,273,*78 $GPGSV,3,2,12,09,33,139,33,04,24,073,35,27,22,137,40,02,17,111,33*78 $GPGSV,3,3,12,32,14,338,19,31,10,301,25,20,09,357,,29,07,198,*7E $GPRMC,101417.000,A,6023.0589,N,00519.8401,E,0.20,81.20,160910,,*34 $GPGGA,101418.000,6023.0589,N,00519.8403,E,1,06,1.7,110.6,M,43.7,M,,0000*56 $GPGSA,A,3,27,09,04,02,12,32,,,,,,,2.5,1.7,1.9*33 $GPRMC,101418.000,A,6023.0589,N,00519.8403,E,0.62,115.49,160910,,*0C $GPGGA,101419.000,6023.0588,N,00519.8405,E,1,06,1.7,110.8,M,43.7,M,,0000*5E $GPGSA,A,3,27,09,04,02,12,32,,,,,,,2.5,1.7,1.9*33 $GPRMC,101419.000,A,6023.0588,N,00519.8405,E,0.36,104.83,160910,,*0D $GPGGA,101420.000,6023.0588,N,00519.8410,E,1,06,1.7,111.4,M,43.7,M,,0000*5D








{kind=link}