|
Past operations & data Scientific equipment
Communications / Navigation / Tracking
Weather Ship contact info VHF Radio Call Sign: Maintenance  Last update: December 27, 2024, at 09:41 AM |
ECHO SOUNDER FURUNO FCV-620INTRODUCTION Furuno Echo Sounder mod. FCV620 (click to zoom). The vessel is furnished with echo sounder with portable transducer, intended for use when traversing open ocean areas. The vessel hull is of course not in contact with water when hovering, so the echo sounder transducer must be lowered into the water by other methods. The echo sounder outputs depth information, which is merged with latitude/longitude and stored on external logger. Echo sounder information:
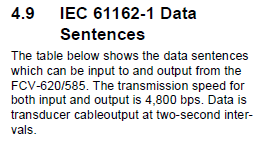
DATA OUTPUTTelegramsThe Echo Sounder will transmit different types of telegrams:
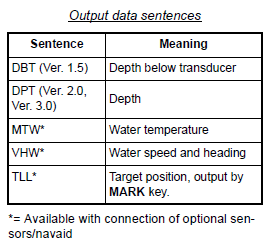
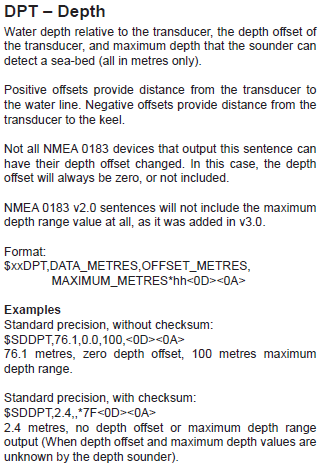
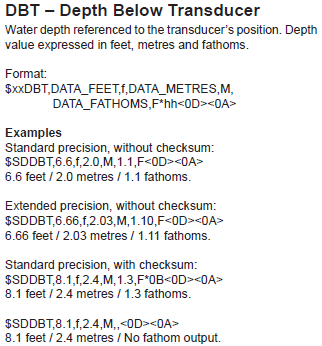
As we are only interested in depth information, we have to consider these two telegram types: DBT and DPT telegram formatsExcerpt from page 13 of NMEA 0183 Information sheet:
It seems the Furuno FCV-620 Echo Sounder outputs the DPT telegram with TWO instead of THREE parameters, as prescribed in format specification. There are slight variations in different manufacturer's implementation of the NMEA standard.
Selecting DBT or DPT?We will log the DPT telegram from the Furuno FCV-620. It has two parameters; the first one is DEPTH BELOW TRANSDUCER, and the second is, at the moment, not determined (see data sample below - it's always set to zero - most likely the offset value, either to waterline or vessel keel). Please refer to NMEA 0183 Information sheet, by Actisense (Local copy) for further information.
SummaryData specifications:
Example data outputThe FURUNO FCV-620 Echo Sounder can be set to simulator mode. We captured some serial data when the instrument was in simulator mode: $SDDPT, 18.43, 0.00*69 $SDDBT, 60.46,f, 18.43,M, 10.07,F*0A $YCMTW, 9.40,C*04 $VWVHW,,T,,M, 18.20,N,,K*51 $SDDPT, 16.75, 0.00*62 $SDDBT, 54.95,f, 16.75,M, 9.15,F*13 $YCMTW, 9.36,C*05 $VWVHW,,T,,M, 18.40,N,,K*57 $SDDPT, 15.07, 0.00*64 $SDDBT, 49.44,f, 15.07,M, 8.24,F*16 $YCMTW, 9.38,C*0B $VWVHW,,T,,M, 18.60,N,,K*55 $SDDPT, 13.22, 0.00*65 $SDDBT, 43.37,f, 13.22,M, 7.22,F*10 $YCMTW, 9.47,C*03 $VWVHW,,T,,M, 18.80,N,,K*5B $SDDPT, 12.34, 0.00*63 $SDDBT, 40.48,f, 12.34,M, 6.74,F*1F $YCMTW, 9.45,C*01 $VWVHW,,T,,M, 19.00,N,,K*52 $SDDPT, 12.46, 0.00*66 $SDDBT, 40.87,f, 12.46,M, 6.81,F*13 $YCMTW, 9.53,C*06 $VWVHW,,T,,M, 19.20,N,,K*50
Echo sounder serial simulator programFor test purposes, it is useful to have a Furuno FCV-620 serial output simulator program: To run this program (or script) you need to install Python and two additional library modules.
If you want to edit the program source code, there is a nice Windows editor called Programmer's Notepad.
FCV-620 data connectorExcerpt from page 35 in FCV-620 Operator's Manual:
Data output should be on Pin 1 and 2, denoted "TD-A" and "TD-B", respectively.
RS-422 data interface standardDenoting the signal lines in such a way indicates a differential signalling scheme - otherwise known as RS-485 and RS-422. There is reference to the IEC 61162-1 standard; it's only available for purchase. An earlier version of the IEC 61162-1 standard can be downloaded from this web site. In order to log data to PC - which accepts signals according to the RS-232 standard - we need an interface converter that accepts RS-422 signals and converts them to RS-232.
RS-422 interface unitsPossible converters listed below.
INTERFACE - AS BUILT Used the US-324 USB2SERIAL 1xRS422/485 adapter from BrainBoxes. Link to Vendor product web page. After installing driver software and connection the adapter to USB port, it appeared as COM port in Device Manager.  Wiring diagram:
RS-422 adapter config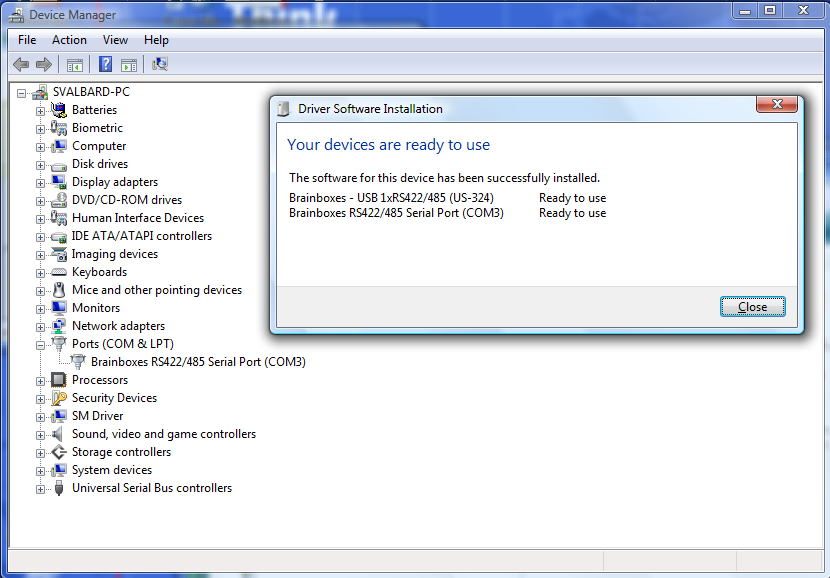
DATA LOGGINGCapture of data from echo sounder is achieved by a combined GPS- and echo sounder logging program. Screenshot of this program during normal operation is shown below. In addition to the stream of telegrams being logged, there is also, once every minute, a clearly readable indication of LATITUDE, LONGITUDE and UTC TIME. This is meant as a crew convenience.  Screenshot of combined GPS and Echo sounder logging software. Information on logging software is on separate page. We will later evaluate LabIML 4.3 for the same purpose. |

")
