|
Past operations & data
Scientific equipment
Communications / Navigation / Tracking
Weather
Ship contact info
VHF Radio Call Sign:
WDE4414
Iridium phone cockpit:
00 - 88 1677 72 7018
Iridium spare 1:
00 - 88 1621 41 8079
Iridium spare 2:
00 - 88 1621 44 3804
Emergency Beacon:
ID: ADE90 05931 C34D
Handheld Emergency Beacon:
ID: LC 4652
Hovercraft registered in Delaware, US:
DL 1519 AB
Maintenance
edit SideBar
Last update: December 27, 2024, at 09:41 AM
Version: pmwiki-2.3.38
|
|
Hovercraft "SABVABAA"
HARD- AND SOFTWARE FOR DISTRIBUTION OF GPS/GNSS DATA OVER NETWORK
| UNIVERSITY OF BERGEN
Department of Earth Science
Allé gt. 41, N-5007 Bergen, Norway
| |
|
|
|
|
|
|
| | 0.1
| DRAFT - for comments
| -
| 25 Sept, 2021
| OM
| OM
| -
| | REV.
| STATUS
| CHANGE
| DATE
| BY
| CHK'D
| APPL
|
OPTIONS FOR GNSS/GPS DATA DISTRIBUTION
- Using "gpsd": https://gpsd.gitlab.io/gpsd/ --- https://en.wikipedia.org/wiki/Gpsd
Problem: This software is based on Linux, so on Win platform, cygwin must first be installed.
- Using commercial GPS distributors, like Gps gate or Eltima producs
PROGRAM
Software
Software has been tested with two different GNSS receivers:
- "Navilock NL-8004U USB 2.0 Multi GNSS Receiver u-blox 8 4.5 m", P/N: 62531
- Following idiosyncrasies found:
- GGA telegram: Number of satellites is limited to 12 -- even though the total number of GPS and GNSS SVs used in solution, is larger then 12. And the number of GPS SVs used can be less then 12, if the point of this limitation was to show only the number of GPS satellites. So this parameter is of very limited use - instead, get total number of SVs used in solution from GNS telegram. And use GSA telegram to distinguish between the number of GPS and GLONASS satellites.
This means that consumers of data - like the program that controls firing of Mini-GUNCO - should fetch number of satellites from GNS if available, and from GGA if not.
- Note that HDOP value is identical in GGA and GNS telegram.
- HOLUX M-215+
- Following idiosyncrasies found:
- GGA telegram: Number of satellites parameter shows the total correct number - the sum of GPS and GLONASS SVs - even though the ID of the telegram ($GP) indicates GPS parameters. So consumers that detects this GNSS receiver (e.g. by lack of GNS data), should get number of satellites from GGA.
- GSA telegram can be used to show distribution of GPS- and GLONASS satellites used in solution. But GSA telegrams are only emitted every 5th second. This means that consumers of data must somehow preserve the last GSA telegrams, and utilize these in the period when GSA are absent (possibly implementing some sort of age control also). This is taken care of in Mini-GUNCO software, in case the HOLUX M-215+ receiver is used (only in an emergency - normally, the latest GNSS receiver, "Navilock NL-8004U u-blox 8" P/N: 62531, should be the preferred model).
Screenshots

Fig. 1: Starting GNSS/GPS data collection and distribution program. Click to enlarge.
| Fig. 1: Starting GNSS/GPS data collection and distribution program:
- First listening for NMEA GNSS/GPS telegrams on available COM ports, also determining bitrate.
- Then analyzing the stream of NMEA telegrams that arrives, in order to determine the last telegram in each "batch" (a batch of different NMEA telegrams arrives at each time instance, in our case each second). This is necessary in order to only extract and forward information tied to a specific second, and not mix data that belongs to different time instances. True, it would not be a catastrophe if such mixing occurred since our application is geophysical data collection where location does not change that fast - it's more a matter of principle. And since different models of GNSS/GPS-receivers seem to vary with regard to start- and end NMEA telegrams for block delineation, auto-detecting this property makes software adjustments that was done before, a thing of the past.
| 
Fig. 2: Completing start-up procedure and starting normal acquisition and distribution. Click to enlarge.
| Fig. 2: Completing start-up procedure and starting normal acquisition and distribution:
- Last telegram in batch found - in this case, $GNZDA.
- Creating objects and threads.
- When attempting to send broadcast UDP telegram on network interface, it was seen that external network interface was not activated, so reverting to only internal network. Should external network interface become active, the program will automatically start using it (providing notification).
| 
Fig. 3: Two TCP socket clients collecting data from the program. Click to enlarge.
| Fig. 3: Two TCP socket clients collecting data from the program. Client socket connection / disconnection notified in blue letters.
| 
Fig.4. The two clients have been terminated. Click to enlarge.
| Fig.4. The two clients have been terminated.
|
NEW GNSS RECEIVER MARCH 2020: "Navilock NL-8004U u-blox 8" (P/N: 62531)
Specifications, chipset information incl. NMEA telegram description

|
Product features:
Configuration of GNSS ublox chipset --- ublox chip manufacturer makes a configuration / evaluation program:
Suppliers:
About the Chipset, u-blox 8 UBX-M8030-KT:
|
NMEA Telegrams from Navilock model NL-8004U (P/N: 62531)
Chipset is u-blox UBX-M8030. References:
| Data sample from Navilock NL-8004U:
1st record, only at the beginning (when opening COM-port):
$GNTXT,01,01,02,u-blox AG - www.u-blox.com*4E
$GNTXT,01,01,02,HW UBX-M8030 00080000*60
$GNTXT,01,01,02,ROM CORE 3.01 (107888)*2B
$GNTXT,01,01,02,FWVER=SPG 3.01*46
$GNTXT,01,01,02,PROTVER=18.00*11
$GNTXT,01,01,02,GPS;GLO;GAL;BDS*77
$GNTXT,01,01,02,SBAS;IMES;QZSS*49
$GNTXT,01,01,02,GNSS OTP=GPS;GLO*37
$GNTXT,01,01,02,LLC=FFFFFFFF-FFFFFFED-FFFFFFFF-FFFFFFFF-FFFFFFE9*50
$GNTXT,01,01,02,ANTSUPERV=AC SD PDoS SR*3E
$GNTXT,01,01,02,ANTSTATUS=OK*25
$GNTXT,01,01,02,PF=3FF*4B
Subsequent records:
$GNRMC,120136.00,A,6023.10268,N,00519.78150,E,0.050,,030320,,,A*62
$GNVTG,,T,,M,0.050,N,0.093,K,A*32
$GNGNS,120136.00,6023.10268,N,00519.78150,E,AA,18,0.73,75.0,43.8,,*53
$GNGGA,120136.00,6023.10268,N,00519.78150,E,1,12,0.73,75.0,M,43.8,M,,*73
$GNGSA,A,3,24,17,19,12,15,10,28,20,01,13,,,1.87,0.73,1.72*17
$GNGSA,A,3,75,66,74,84,76,83,67,85,,,,,1.87,0.73,1.72*19
$GPGSV,3,1,12,01,14,011,40,10,25,282,27,12,38,217,25,13,07,153,09*73
$GPGSV,3,2,12,15,26,178,10,17,40,070,41,19,41,102,27,20,10,253,11*78
$GPGSV,3,3,12,24,78,225,21,25,06,230,21,28,16,057,42,32,19,314,06*76
$GLGSV,3,1,10,65,26,211,,66,49,293,25,67,15,342,34,74,33,075,39*6D
$GLGSV,3,2,10,75,84,306,21,76,32,262,16,83,19,006,27,84,36,070,37*66
$GLGSV,3,3,10,85,12,126,20,,,,46*5F
$GNGLL,6023.10268,N,00519.78150,E,120136.00,A,A*7C
$GNGST,120136.00,3326643,,,,4.1,1.9,7.2*73
$GNZDA,120136.00,03,03,2020,00,00*7F
$GNRMC,120137.00,A,6023.10269,N,00519.78144,E,0.061,,030320,,,A*65
$GNVTG,,T,,M,0.061,N,0.113,K,A*39
$GNGNS,120137.00,6023.10269,N,00519.78144,E,AA,16,1.11,74.9,43.8,,*55
$GNGGA,120137.00,6023.10269,N,00519.78144,E,1,12,1.11,74.9,M,43.8,M,,*7B
$GNGSA,A,3,24,17,19,12,10,28,01,13,,,,,2.82,1.11,2.60*12
$GNGSA,A,3,75,66,74,84,76,83,67,85,,,,,2.82,1.11,2.60*1A
$GPGSV,3,1,12,01,14,011,40,10,25,282,27,12,38,217,25,13,07,153,10*7B
$GPGSV,3,2,12,15,26,178,07,17,40,070,41,19,41,102,26,20,10,253,09*76
$GPGSV,3,3,12,24,78,225,22,25,06,230,21,28,16,057,42,32,19,314,12*70
$GLGSV,3,1,10,65,26,211,,66,49,293,26,67,15,342,34,74,33,075,39*6E
$GLGSV,3,2,10,75,84,306,19,76,32,262,18,83,19,006,27,84,36,070,37*63
$GLGSV,3,3,10,85,12,126,21,,,,46*5E
$GNGLL,6023.10269,N,00519.78144,E,120137.00,A,A*79
$GNGST,120137.00,24,,,,4.1,1.9,7.1*42
$GNZDA,120137.00,03,03,2020,00,00*7E
$GNRMC,120138.00,A,6023.10270,N,00519.78142,E,0.053,,030320,,,A*65
$GNVTG,,T,,M,0.053,N,0.098,K,A*3A
$GNGNS,120138.00,6023.10270,N,00519.78142,E,AA,17,0.79,74.8,43.8,,*5B
$GNGGA,120138.00,6023.10270,N,00519.78142,E,1,12,0.79,74.8,M,43.8,M,,*74
$GNGSA,A,3,24,17,19,12,15,10,28,01,13,,,,2.17,0.79,2.02*11
$GNGSA,A,3,75,66,74,84,76,83,67,85,,,,,2.17,0.79,2.02*1D
$GPGSV,3,1,12,01,14,011,40,10,25,282,27,12,38,217,25,13,07,153,12*79
$GPGSV,3,2,12,15,26,178,12,17,40,070,41,19,41,102,25,20,10,253,08*70
$GPGSV,3,3,12,24,78,225,22,25,06,230,21,28,16,057,42,32,19,314,07*74
$GLGSV,3,1,10,65,26,211,,66,49,293,26,67,15,342,34,74,33,075,39*6E
$GLGSV,3,2,10,75,84,306,16,76,32,262,20,83,19,006,27,84,36,070,36*66
$GLGSV,3,3,10,85,12,126,21,,,,45*5D
$GNGLL,6023.10270,N,00519.78142,E,120138.00,A,A*78
$GNGST,120138.00,443098,,,,4.0,1.9,7.1*48
$GNZDA,120138.00,03,03,2020,00,00*71
| RMC -- Recommended Minimum Data
Example:
$GNRMC,120136.00,A,6023.10268,N,00519.78150,E,0.050,,030320,,,A*62
$xxRMC,time,status,lat,NS,lon,EW,spd,cog,date,mv,mvEW,posMode,navStatus*cs<CR><LF>
where:
status: V = Data invalid, A = Data valid
spd: Speed over ground [knots]
cog: Course over ground [degrees]
mv: Magnetic variation value. Only supported in ADR 4.10 and later
mvEW: Magnetic variation E/W indicator. Only in ADR 4.10 and later
posMode: Mode Indicator
N = No fix
E = Estimated/Dead reckoning fix
A = Autonomous GNSS fix
D = Differential GNSS fix
F = RTK float
R = RTK fixed
navStatus: Navigational status indicator
V = Equipment is not providing navigational status information,
fixed field, only available in NMEA 4.10 and later
| GNS -- GNSS fix data
Example:
$GNGNS,120136.00,6023.10268,N,00519.78150,E,AA,18,0.73,75.0,43.8,,*53
$xxGNS,time,lat,NS,lon,EW,posMode,numSV,HDOP,alt,sep,diffAge,diffStation,navStatus*cs<CR><LF>
where:
posMode: Positioning mode, see position fix flags description.
1st character for GPS, 2nd character for GLONASS,
3rd character for Galileo, 4th character for BeiDou
alt: Altitude above mean sea level
sep: Geoid separation: difference between ellipsoid and mean sea level
diffAge: Age of diff corrections [seconds], null when DGPS is not used
diffStation: ID of station providing diff corrections, null when DGPS is not used
navStatus: Navigational status indicator
V (Equipment is not providing navigational status information,
fixed field, only available in NMEA 4.10 and later)
| GGA -- Global positioning system fix data
Example:
$GNGGA,120136.00,6023.10268,N,00519.78150,E,1,12,0.73,75.0,M,43.8,M,,*73
The NMEA specification indicates that the GGA message is GPS specific. However, when the receiver is configured for multi-GNSS, the GGA message contents will be generated from the multi-GNSS solution. For multi-GNSS use, it is recommended that the NMEA-GNS message is used instead.
$xxGGA,time,lat,NS,lon,EW,quality,numSV,HDOP,alt,altUnit,sep,sepUnit,diffAge,diffStation*cs<CR><LF>
where:
quality: Quality indicator for position fix, see position fix flags description [1]
0 = No fix
1 = Autonomous GNSS fix
2 = Differential GNSS fix
4 = RTK fixed
5 = RTK float
6 = Estimated/Dead reckoning fix
| GSA -- GNSS DOP and Active Satellites
Example:
$GNGSA,A,3,24,17,19,12,15,10,28,20,01,13,,,1.87,0.73,1.72*17
$GNGSA,A,3,75,66,74,84,76,83,67,85,,,,,1.87,0.73,1.72*19
- If less than 12 SVs are used for navigation, the remaining fields are left empty. If more than 12 SVs are used for navigation, only the IDs of the first 12 are output.
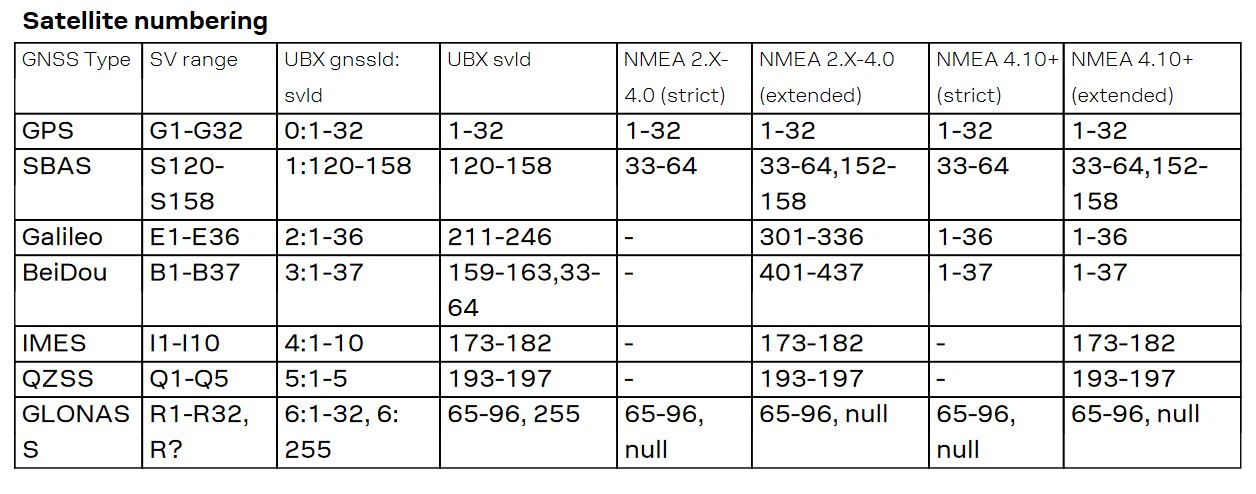
- The SV numbers (fields 'svid') are in the range of 1 to 32 for GPS satellites, and 33 to 64 for SBAS satellites (33 = SBAS PRN 120, 34 = SBAS PRN 121, and so on).
- In a multi-GNSS system this message will be output multiple times, once for each GNSS.
$xxGSA,opMode,navMode{,svid},PDOP,HDOP,VDOP,systemId*cs<CR><LF>
where:
opMode: Operation mode:
M = Manually set to operate in 2D or 3D mode
A = Automatically switching between 2D or 3D mode
navMode: Navigation mode, see position fix flags description [1]
Possible values for navMode:
1 = No fix
2 = 2D fix
3 = 3D fix
svid: Space Vehicle ID - Start of repeated block (12 times)
PDOP: Position dilution of precision
HDOP: Horizontal dilution of precision
VDOP: Vertical dilution of precision
systemId: NMEA defined GNSS System ID, see Signal Identifiers table [2]
Only available in NMEA 4.10 and later
| GST -- GNSS Pseudo Range Error Statistics
Example:
$GNGST,120136.00,3326643,,,,4.1,1.9,7.2*73
This message reports statistical information on the quality of the position
solution.
$xxGST,time,rangeRms,stdMajor,stdMinor,orient,stdLat,stdLong,stdAlt*cs<CR><LF>
where:
rangeRms: RMS value of the standard deviation of the ranges [meter]
stdMajor: Standard deviation of semi-major axis (only in ADR 4.10 and later)
stdMinor: Standard deviation of semi-minor axis (only in ADR 4.10 and later)
orient: Orientation of semi-major axis (only in ADR 4.10 and later)
stdLat: Standard deviation of latitude error [meter]
stdLong: Standard deviation of longitude error [meter]
stdAlt: Standard deviation of altitude error [meter]
| ZDA -- Time and Date
Example:
$GNZDA,120136.00,03,03,2020,00,00*7F
$xxZDA,time,day,month,year,ltzh,ltzn*cs<CR><LF>
where:
ltzh: Local time zone hours: 00 (fixed field)
ltzn: Local time zone minutes: 00 (fixed field)
|
[1] Position fix flags description
[2] Signal Identifiers table
GNSS RECEIVER CANDIDATES, MARCH 2020
| Manufacturer: NaviLock
| Manufacturer: VFAN
|
|---|
|
Chipset: u-blox 8 UBX-M8030-KT
| 
- Manufacturer: VFAN
- Model: "USB GPS Receiver Antenna for Laptop PC Car Marine, Support GPS/Galileo/Beidou/GLONASS"
- Supplier: Amazon
From supplier description:
- Built-In U-blox M8030 Chipset. Concurrent reception of up to 3 GNSS (GPS, Galileo, GLONASS, BeiDou), Support for all satellite augmentation systems, The fimware supports QZSS, GAGAN and IMES together with WAAS, EGNOS, and MSAS.
- Receiver type: 72-channel u-blox M8 engine GPS/QZSS L1 C/A, GLONASS L10F BeiDou B1, Galileo E1B/C SBAS L1 C/A: WAAS, EGNOS, MSAS, GAGANIndustry leading –167 dBm navigation sensitivity, "Superior position accuracy in urban canyons".
- Compatible: Win 10/ Win 8/ Win 7/Vista/XP/. Free GNSS Evaluation Software. 56-Channel All-IN-VIEW Tracking
- Support OpenCPN, Realtime Google Earth Pro and maps.
- The UBX-M8030 high performance standard precision GNSS chips from u-blox provide exceptional sensitivity and acquisition times for all GNSS systems. The chips utilize concurrent reception of up to three GNSS systems (GPS/Galileo together with either Beidou or GLONASS). Reception from more than one constellation simultaneously allows extraordinary positioning accuracy in urban canyons, even with weak signals and high dynamics.
- The UBX-M8030 chips feature low power consumption in concurrent reception mode and support advanced Power Save Modes for all GNSS, the power consumption remains low even for weak signals. The UBX-M8030 chips also support message integrity protection, geofencing and spoofing detection with configurable interface settings to easy fi to customer applications. The firmware supports QZSS, GAGAN and IMES together with WAAS, EGNOS, and MSAS.
- Time to fist fix
- Cold starts:26 s
- Aided start: 2 s
- Hot start:1 s
- Sensitivity
- Tracking & Nav: –167 dBm
- Reacquisition: –160 dBm
- Cold start: –148 dBm
- Hot start: –157 dBm
Chipset: U-blox M8030
|
- Manufacturer: VFAN
- Model:
- Supplier: Amazon
- Electrical Characteristics:
- GPS Chipset: U-BLOX UB-6010
- Sensitivity: -162 dBm ~-158 dBm
- Channels: 56 channelS
- Mechanical specifications:
- USB Cable length: 2M
- Dimension: 45*38*13 mm
- Connector: USB Port 4. Magnetic Base
- Protocol:
- NMEA 0183 v2.3
- Support:VTG,GLL,TXT ublox binary and NMEA Command
- Default:GGA,GSA,GSV,RMC
- Package Include:
- GPS Receiver *1 2.GPS Driver Disc *1 1.NMEA 0183 v2.3
- X1 USB GPS Receiver
- X1 USB GPS Driver Disc *1
- Application Guide [pdf]
- Comparison Chart [pdf]
- User Guide [pdf]
- User Manual [pdf]
|
NTRIP = Networked Transport of RTCM via Internet Protocol
OTHER GNSS RECEIVERS
HOLUX M-215+
Update 12 Feb, 2020:
Unfortunately, the manufacturer Holux decided to vanish without a trace. Distributor Amazon reports: "Currently unavailable. We don't know when or if this item will be back in stock." Customers who have earlier acquired Holux product are upset as this affects warranty issues, among other things - here is an example: https://holux.info/holux-com-is-offline/
HOLUX M-215+
This unit appears as a COM-device. Since there are many new types of NMEA telegrams - and we are not sure if all telegram types output GNSS-quality data, we should split the GPS data stream and direct one for logging to disk, and the other to Chirp Sonar program. In that way we can post-process all raw navigation data - not only the (possible) sub-set that Chirp Sonar program deals with. (Many uncertain factors here !!)
Basic Specifications
- MTK MT3333 GPS/ GLONASS chipset ---- Comparison with other chipsets (PDF)
- MT3333 is now (2020) managed and sold by AIROHA, a MediaTek subsidiary.
- 66 parallel searching, 22 tracking channels
- Receiver: L1, 1575.42 MHz
- C/A code: 1.023 MHz
- Update rate: 1Hz.
- Antenna type: Built in patch antenna
- Minimum Signal tracked: -165dBm
- Dimension: 64.5 x 42 X 17.8 mm.
- Weight: < 84g.
- Waterproof: IPX7 ("X7" where second digit is seven; it means: Immersion, up to 1 m depth -- Ingress of water in harmful quantity shall not be possible when the enclosure is immersed in water under defined conditions of pressure and time (up to 1 m of submersion).
- Operation temperature: -10 C to + 60 C
- Store temperature: -20 C to + 70 C.
- Operation humidity: 5% to 95% no condensing
- Non DGPS (Differential GPS):
- Position: 3.0 M CEP excluding SA
- (Refer to MTK chip specification): Velocity: 0.1 M / sec.
NMEA protocol output V.3.01
- Protocol and interface Baud rate: 4800 bps
- Data bit: 8
- Parity: N
- Stop bit: 1
Output NMEA telegrams
Description of NMEA telegrams: MT3333 Platform NMEA Message Specification For GPS+GLONASS_V1.00 (PDF) ---- also local copy
| Message ID
| Meaning
| Rate
|
|---|
| GPGGA
| Global Positioning System Fixed Data, example:
$GPGGA,083901.000,6023.0793,N,00519.7550,E,1,11,0.97,18.5,M,43.7,M,,*5D
ID, UTC, Lat, N/S, Lon, E/W, Pos fix indicator, Nsats, HDOP, MSL alt, units, geoid sep, units, age of diff corr, diff ref station id
where:
Pos fix indicator: 0 = Fix not available or invalid
1 = GPS SPS mode, fix valid
2 = Diff GPS, SPS mode, fix valid
3-5 not supported
6 = Dead reckoning mode, fix valid
| 1time/1sec
| | GPRMC ~ GNRMC
| Recommended Minimum Specific GNSS Data
$GNRMC,083901.000,A,6023.0793,N,00519.7550,E,0.00,214.26,110220,,,A*70
ID, UTC, status, lat, N/S, lon, E/W, speed o/ground [kt], course o/ground [deg], date, mag variation, E/W, mode
where:
status: A = data valid
V = invalid
mode: A = autonomous
D = DGPS
| 1time/1sec
| | GPVTG
| Course Over Ground and Ground Speed
| 1time/1sec
| | GNGSA
| GNSS DOP and Active Satellites
$GNGSA,A,3,09,30,21,07,,,,,,,,,1.32,1.03,0.82*1A
$GNGSA,A,3,65,83,66,82,76,75,,,,,,,1.32,1.03,0.82*15
ID, mode_1, mode_2, SV#_used_ch1, ...,SV#_used_ch12, PDOP, HDOP, VDOP
where:
mode_1: M = manual; set to operate in 2D or 3D mode
A = automatic switch between 2D/3D
mode_2: 1 = fix not available
2 = 2D (<4SVs used)
3 = 3D (>3SVs used)
| 1time/5sec
| | GPGSA
| GNSS DOP and Active Satellites
| 2time/5sec
| | GPGSV / GLGSV
| GNSS Satellites in View
$GPGSV,3,1,12,05,63,251,,07,62,092,35,30,61,174,18,13,32,263,18*72
$GPGSV,3,2,12,09,19,098,29,39,19,157,,21,12,340,36,02,10,223,*73
$GPGSV,3,3,12,16,09,016,,27,08,042,,15,04,275,37,28,01,156,*75
$GLGSV,2,1,08,66,73,300,27,75,63,096,37,65,38,122,23,76,36,174,25*69
$GLGSV,2,2,08,82,25,297,22,83,24,350,36,67,19,300,,81,03,254,18*68
ID, no_of_msg, msg_no, sats_in_view, SV#, elevation, azimuth, S/N_ratio, {repeat 3 sets, each 4 parameters}
| 1time/5sec
|
Sample data set
NOTE: $GPVTG is the last telegram of each "batch", which is separated by empty lines here.
In red: GGA telegram reports 14 SVs used in solution. GSA shows further details: Of these 14 satellites, 8 are GPS, while 6 are GLONASS.
$GPGGA,152530.000,6021.9903,N,00522.0072,E,2,14,0.81,95.0,M,43.7,M,0000,0000*59
$GNGSA,A,3,31,25,21,26,29,04,16,09,,,,,1.11,0.81,0.76*16
$GNGSA,A,3,86,85,68,75,67,76,,,,,,,1.11,0.81,0.76*1A
$GPGSV,3,1,12,29,73,098,23,31,51,231,21,26,45,282,26,25,32,122,22*7C
$GPGSV,3,2,12,21,28,175,32,49,21,180,30,04,19,320,16,05,17,073,*79
$GPGSV,3,3,12,02,16,040,,16,16,287,18,09,10,353,18,12,02,113,*79
$GLGSV,3,1,09,85,74,076,19,76,71,287,14,75,48,157,36,86,41,207,29*6B
$GLGSV,3,2,09,68,22,001,15,77,18,317,,84,18,041,,67,11,311,24*6E
$GLGSV,3,3,09,69,10,051,*56
$GNRMC,152530.000,A,6021.9903,N,00522.0072,E,0.00,280.04,250320,,,D*7B
$GPVTG,280.04,T,,M,0.00,N,0.00,K,D*36
$GPGGA,152531.000,6021.9903,N,00522.0072,E,2,14,0.81,95.0,M,43.7,M,0000,0000*58
$GNRMC,152531.000,A,6021.9903,N,00522.0072,E,0.00,280.04,250320,,,D*7A
$GPVTG,280.04,T,,M,0.00,N,0.00,K,D*36
$GPGGA,152532.000,6021.9903,N,00522.0072,E,2,14,0.81,95.0,M,43.7,M,0000,0000*5B
$GNRMC,152532.000,A,6021.9903,N,00522.0072,E,0.00,280.04,250320,,,D*79
$GPVTG,280.04,T,,M,0.00,N,0.00,K,D*36
$GPGGA,152533.000,6021.9903,N,00522.0072,E,2,14,0.81,95.0,M,43.7,M,0000,0000*5A
$GNRMC,152533.000,A,6021.9903,N,00522.0072,E,0.00,280.04,250320,,,D*78
$GPVTG,280.04,T,,M,0.00,N,0.00,K,D*36
$GPGGA,152534.000,6021.9903,N,00522.0072,E,2,14,0.81,95.0,M,43.7,M,0000,0000*5D
$GNRMC,152534.000,A,6021.9903,N,00522.0072,E,0.00,280.04,250320,,,D*7F
$GPVTG,280.04,T,,M,0.00,N,0.00,K,D*36
$GPGGA,152535.000,6021.9903,N,00522.0072,E,2,13,0.87,95.0,M,43.7,M,0000,0000*5D
$GNGSA,A,3,31,25,21,26,29,04,16,,,,,,1.16,0.87,0.78*10
$GNGSA,A,3,86,85,68,75,67,76,,,,,,,1.16,0.87,0.78*15
$GPGSV,3,1,12,29,73,098,24,31,51,231,22,26,45,282,26,25,32,122,22*78
$GPGSV,3,2,12,21,28,175,31,49,21,180,29,04,19,320,15,05,17,073,*71
$GPGSV,3,3,12,02,16,040,,16,16,287,18,09,10,353,18,12,02,113,*79
$GLGSV,3,1,09,85,74,076,19,76,71,287,17,75,48,157,37,86,41,207,29*69
$GLGSV,3,2,09,68,22,001,15,77,18,317,,84,18,041,,67,11,311,25*6F
$GLGSV,3,3,09,69,10,051,*56
$GNRMC,152535.000,A,6021.9903,N,00522.0072,E,0.00,280.04,250320,,,D*7E
$GPVTG,280.04,T,,M,0.00,N,0.00,K,D*36
$GPGGA,152536.000,6021.9903,N,00522.0072,E,2,14,0.81,95.0,M,43.7,M,0000,0000*5F
$GNRMC,152536.000,A,6021.9903,N,00522.0072,E,0.00,280.04,250320,,,D*7D
$GPVTG,280.04,T,,M,0.00,N,0.00,K,D*36
$GPGGA,152537.000,6021.9903,N,00522.0072,E,2,14,0.81,95.0,M,43.7,M,0000,0000*5E
$GNRMC,152537.000,A,6021.9903,N,00522.0072,E,0.00,280.04,250320,,,D*7C
$GPVTG,280.04,T,,M,0.00,N,0.00,K,D*36
$GPGGA,152538.000,6021.9903,N,00522.0072,E,2,14,0.81,95.0,M,43.7,M,0000,0000*51
$GNRMC,152538.000,A,6021.9903,N,00522.0072,E,0.00,280.04,250320,,,D*73
$GPVTG,280.04,T,,M,0.00,N,0.00,K,D*36
$GPGGA,152539.000,6021.9903,N,00522.0072,E,2,14,0.81,95.0,M,43.7,M,0000,0000*50
$GNRMC,152539.000,A,6021.9903,N,00522.0072,E,0.00,280.04,250320,,,D*72
$GPVTG,280.04,T,,M,0.00,N,0.00,K,D*36
$GPGGA,152540.000,6021.9903,N,00522.0072,E,2,14,0.81,95.0,M,43.7,M,0000,0000*5E
$GNGSA,A,3,31,25,21,26,29,04,16,09,,,,,1.11,0.81,0.76*16
$GNGSA,A,3,86,85,68,75,67,76,,,,,,,1.11,0.81,0.76*1A
$GPGSV,3,1,12,29,73,098,24,31,51,231,21,26,45,282,26,25,32,122,18*72
$GPGSV,3,2,12,21,28,175,32,49,21,180,29,04,19,320,15,05,17,073,*72
$GPGSV,3,3,12,02,16,040,,16,16,287,18,09,10,353,18,12,02,113,*79
$GLGSV,3,1,09,85,74,076,20,76,71,287,22,75,48,157,36,86,41,207,31*6D
$GLGSV,3,2,09,68,22,001,17,77,18,317,,84,18,041,,67,11,311,24*6C
$GLGSV,3,3,09,69,10,051,*56
$GNRMC,152540.000,A,6021.9903,N,00522.0072,E,0.00,280.04,250320,,,D*7C
$GPVTG,280.04,T,,M,0.00,N,0.00,K,D*36
$GPGGA,152541.000,6021.9903,N,00522.0072,E,2,14,0.81,95.0,M,43.7,M,0000,0000*5F
$GNRMC,152541.000,A,6021.9903,N,00522.0072,E,0.00,280.04,250320,,,D*7D
$GPVTG,280.04,T,,M,0.00,N,0.00,K,D*36
$GPGGA,152542.000,6021.9903,N,00522.0072,E,2,14,0.81,95.0,M,43.7,M,0000,0000*5C
$GNRMC,152542.000,A,6021.9903,N,00522.0072,E,0.00,280.04,250320,,,D*7E
$GPVTG,280.04,T,,M,0.00,N,0.00,K,D*36
Global Sat BU-353W10 USB GNSS Sensor
Specifications

Click to enlarge.
| From:https://www.gpscentral.ca/products/usglobalsat/bu353-w10.html
- GNSS Module: U-Blox M8M
- Routes: 72 channel
- Dimensions: 2.08" diameter x 0.75" (53mm dia. x 19.2mm)
- USB Cable Length: 5ft (1.5m)
- Waterproof Standard: IPX6
- Operating temperature: -40° ~ 176°F (-40° ~ 80°C)
- Humidity: Up to 95% non-condensing
- Voltage: 4.5V - 6.5V
- Power: Powered via USB 2.0
- Connect to PC interface: USB interface
- OS Compatibility: Windows 8 and 10 only
- Support: GNSS Location Sensor for Windows Apps
- GNSS System: GPS + GLONASS
GNSS Module: U-Blox M8M:
|
Drivers
Sample data set
Initial records start with "$GNTXT". Empty lines separates subsequent records, received at 1 Hz.
In initial record, GGA telegram reports 12 SVs used in solution. GSA shows further details: Of these 12 satellites, 5 are GPS, while 7 are GLONASS.
$GNRMC,132232.00,A,6023.09767,N,00519.78437,E,0.496,,250921,,,A*61
$GNGGA,132232.00,6023.09767,N,00519.78437,E,1,12,0.77,51.4,M,43.8,M,,*77
$GNGSA,M,3,04,26,07,29,03,,,,,,,,1.43,0.77,1.20*1A
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.43,0.77,1.20*14
$GNTXT,01,01,02,u-blox AG - www.u-blox.com*4E
$GNTXT,01,01,02,HW UBX-M8030 00080000*60
$GNTXT,01,01,02,ROM CORE 3.01 (107888)*2B
$GNTXT,01,01,02,FWVER=SPG 3.01*46
$GNTXT,01,01,02,PROTVER=18.00*11
$GNTXT,01,01,02,GPS;GLO;GAL;BDS*77
$GNTXT,01,01,02,SBAS;IMES;QZSS*49
$GNTXT,01,01,02,GNSS OTP=GPS;GLO*37
$GNTXT,01,01,02,LLC=FFFFFFFF-FFFF7CBF-FFED7FCE-FFFFFFFF-FFFFFFF9*54
$GNTXT,01,01,02,ANTSUPERV=AC SD PDoS SR*3E
$GNTXT,01,01,02,ANTSTATUS=OK*25
$GNTXT,01,01,02,PF=3FF*4B
$GNRMC,132233.00,A,6023.09781,N,00519.78460,E,0.450,,250921,,,A*60
$GNGGA,132233.00,6023.09781,N,00519.78460,E,1,12,0.77,51.5,M,43.8,M,,*7D
$GNGSA,M,3,04,26,07,29,03,,,,,,,,1.43,0.77,1.20*1A
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.43,0.77,1.20*14
$GNRMC,132234.00,A,6023.09799,N,00519.78484,E,0.746,100.02,250921,,,A*7D
$GNGGA,132234.00,6023.09799,N,00519.78484,E,1,11,0.80,51.9,M,43.8,M,,*7E
$GNGSA,M,3,04,26,07,29,03,,,,,,,,1.46,0.80,1.23*14
$GNGSA,M,3,74,65,66,67,82,83,,,,,,,1.46,0.80,1.23*1B
$GNRMC,132235.00,A,6023.09810,N,00519.78498,E,0.633,75.47,250921,,,A*4E
$GNGGA,132235.00,6023.09810,N,00519.78498,E,1,12,0.77,52.2,M,43.8,M,,*7F
$GNGSA,M,3,04,26,07,29,03,,,,,,,,1.43,0.77,1.20*1A
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.43,0.77,1.20*14
$GNRMC,132236.00,A,6023.09814,N,00519.78497,E,0.133,,250921,,,A*6E
$GNGGA,132236.00,6023.09814,N,00519.78497,E,1,12,0.93,52.4,M,43.8,M,,*7B
$GNGSA,M,3,04,26,07,29,03,,,,,,,,1.66,0.93,1.37*11
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.66,0.93,1.37*1F
$GPGSV,4,1,14,02,40,298,21,03,19,112,22,04,60,084,28,06,57,235,13*70
$GPGSV,4,2,14,07,16,171,18,09,71,195,,11,44,293,19,16,04,084,*79
$GPGSV,4,3,14,19,04,226,,20,15,289,16,22,01,115,,26,15,051,39*79
$GPGSV,4,4,14,29,08,355,38,31,04,024,*77
$GLGSV,3,1,09,65,23,079,41,66,84,016,21,67,36,264,15,74,17,009,47*60
$GLGSV,3,2,09,75,37,067,39,76,17,124,17,81,28,213,16,82,51,276,21*6C
$GLGSV,3,3,09,83,28,334,18*50
$GNRMC,132237.00,A,6023.09817,N,00519.78495,E,0.131,,250921,,,A*6C
$GNGGA,132237.00,6023.09817,N,00519.78495,E,1,11,0.93,52.6,M,43.8,M,,*7A
$GNGSA,M,3,04,26,29,03,,,,,,,,,1.66,0.93,1.37*16
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.66,0.93,1.37*1F
$GNRMC,132238.00,A,6023.09818,N,00519.78493,E,0.149,,250921,,,A*65
$GNGGA,132238.00,6023.09818,N,00519.78493,E,1,11,0.93,52.7,M,43.8,M,,*7D
$GNGSA,M,3,04,26,29,03,,,,,,,,,1.66,0.93,1.37*16
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.66,0.93,1.37*1F
$GNRMC,132239.00,A,6023.09813,N,00519.78476,E,0.439,,250921,,,A*66
$GNGGA,132239.00,6023.09813,N,00519.78476,E,1,12,0.93,52.9,M,43.8,M,,*71
$GNGSA,M,3,04,26,07,29,03,,,,,,,,1.66,0.93,1.37*11
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.66,0.93,1.37*1F
$GNRMC,132240.00,A,6023.09814,N,00519.78471,E,0.138,,250921,,,A*6C
$GNGGA,132240.00,6023.09814,N,00519.78471,E,1,12,0.93,53.1,M,43.8,M,,*76
$GNGSA,M,3,04,26,07,29,03,,,,,,,,1.66,0.93,1.37*11
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.66,0.93,1.37*1F
$GNRMC,132241.00,A,6023.09815,N,00519.78466,E,0.121,,250921,,,A*62
$GNGGA,132241.00,6023.09815,N,00519.78466,E,1,12,0.94,53.2,M,43.8,M,,*74
$GNGSA,M,3,04,26,07,29,03,,,,,,,,1.66,0.94,1.37*16
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.66,0.94,1.37*18
$GPGSV,4,1,14,02,40,298,20,03,19,112,22,04,60,084,28,06,57,235,*73
$GPGSV,4,2,14,07,16,171,15,09,71,195,20,11,45,292,17,16,04,084,*78
$GPGSV,4,3,14,19,04,226,,20,15,289,16,22,01,115,,26,15,051,39*79
$GPGSV,4,4,14,29,08,355,37,31,04,024,*78
$GLGSV,3,1,09,65,23,079,41,66,84,016,24,67,36,264,19,74,17,009,47*69
$GLGSV,3,2,09,75,37,067,39,76,17,124,20,81,28,213,11,82,51,276,23*6D
$GLGSV,3,3,09,83,28,334,19*51
$GNRMC,132242.00,A,6023.09816,N,00519.78462,E,0.242,,250921,,,A*60
$GNGGA,132242.00,6023.09816,N,00519.78462,E,1,11,0.94,53.4,M,43.8,M,,*75
$GNGSA,M,3,04,26,29,03,,,,,,,,,1.66,0.94,1.37*11
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.66,0.94,1.37*18
$GNRMC,132243.00,A,6023.09821,N,00519.78463,E,0.039,,250921,,,A*6A
$GNGGA,132243.00,6023.09821,N,00519.78463,E,1,11,1.18,53.7,M,43.8,M,,*77
$GNGSA,M,3,04,26,29,03,,,,,,,,,1.88,1.18,1.47*13
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.88,1.18,1.47*1A
$GNRMC,132244.00,A,6023.09810,N,00519.78445,E,0.327,,250921,,,A*67
$GNGGA,132244.00,6023.09810,N,00519.78445,E,1,11,1.18,53.6,M,43.8,M,,*77
$GNGSA,M,3,04,26,29,03,,,,,,,,,1.88,1.18,1.47*13
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.88,1.18,1.47*1A
$GNRMC,132245.00,A,6023.09805,N,00519.78436,E,0.260,,250921,,,A*64
$GNGGA,132245.00,6023.09805,N,00519.78436,E,1,11,1.18,53.7,M,43.8,M,,*77
$GNGSA,M,3,04,26,29,03,,,,,,,,,1.88,1.18,1.47*13
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.88,1.18,1.47*1A
$GNRMC,132246.00,A,6023.09800,N,00519.78424,E,0.251,,250921,,,A*63
$GNGGA,132246.00,6023.09800,N,00519.78424,E,1,11,1.18,53.8,M,43.8,M,,*7D
$GNGSA,M,3,04,26,29,03,,,,,,,,,1.88,1.18,1.47*13
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.88,1.18,1.47*1A
$GPGSV,4,1,14,02,40,298,20,03,19,112,22,04,60,084,29,06,57,235,*72
$GPGSV,4,2,14,07,16,171,,09,71,195,21,11,45,292,13,16,04,083,*7E
$GPGSV,4,3,14,19,04,226,,20,15,289,15,22,01,115,,26,15,051,39*7A
$GPGSV,4,4,14,29,08,355,38,31,04,024,*77
$GLGSV,3,1,09,65,23,079,41,66,84,016,26,67,36,264,20,74,17,009,47*61
$GLGSV,3,2,09,75,37,067,39,76,17,124,22,81,28,213,10,82,51,276,25*68
$GLGSV,3,3,09,83,28,334,19*51
$GNRMC,132247.00,A,6023.09800,N,00519.78419,E,0.131,,250921,,,A*69
$GNGGA,132247.00,6023.09800,N,00519.78419,E,1,11,1.18,53.9,M,43.8,M,,*73
$GNGSA,M,3,04,26,29,03,,,,,,,,,1.88,1.18,1.47*13
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.88,1.18,1.47*1A
$GNRMC,132248.00,A,6023.09798,N,00519.78411,E,0.066,,250921,,,A*63
$GNGGA,132248.00,6023.09798,N,00519.78411,E,1,11,1.42,54.0,M,43.8,M,,*7B
$GNGSA,M,3,04,26,29,03,,,,,,,,,2.24,1.42,1.74*19
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,2.24,1.42,1.74*10
$GNRMC,132249.00,A,6023.09798,N,00519.78407,E,0.049,,250921,,,A*68
$GNGGA,132249.00,6023.09798,N,00519.78407,E,1,11,1.42,54.1,M,43.8,M,,*7C
$GNGSA,M,3,04,26,29,03,,,,,,,,,2.24,1.42,1.74*19
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,2.24,1.42,1.74*10
$GNRMC,132250.00,A,6023.09794,N,00519.78395,E,0.348,,250921,,,A*62
$GNGGA,132250.00,6023.09794,N,00519.78395,E,1,11,1.41,54.2,M,43.8,M,,*74
$GNGSA,M,3,04,26,29,03,,,,,,,,,2.24,1.41,1.74*1A
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,2.24,1.41,1.74*13
$GNRMC,132251.00,A,6023.09792,N,00519.78387,E,0.157,,250921,,,A*6A
$GNGGA,132251.00,6023.09792,N,00519.78387,E,1,11,1.41,54.2,M,43.8,M,,*70
$GNGSA,M,3,04,26,29,03,,,,,,,,,2.24,1.41,1.73*1D
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,2.24,1.41,1.73*14
$GPGSV,4,1,14,02,40,298,21,03,19,112,21,04,60,084,29,06,57,235,*70
$GPGSV,4,2,14,07,16,171,,09,71,195,19,11,45,292,16,16,04,083,*70
$GPGSV,4,3,14,19,03,226,,20,16,289,,22,01,115,,26,15,051,39*7A
$GPGSV,4,4,14,29,08,355,37,31,04,024,*78
$GLGSV,3,1,09,65,23,079,41,66,84,016,27,67,36,264,12,74,17,009,47*61
$GLGSV,3,2,09,75,37,067,40,76,17,124,19,81,28,213,18,82,51,276,26*65
$GLGSV,3,3,09,83,28,334,19*51
$GNRMC,132252.00,A,6023.09792,N,00519.78382,E,0.040,,250921,,,A*6B
$GNGGA,132252.00,6023.09792,N,00519.78382,E,1,10,1.41,54.3,M,43.8,M,,*76
$GNGSA,M,3,04,26,29,03,,,,,,,,,2.24,1.41,1.73*1D
$GNGSA,M,3,74,65,66,76,82,83,,,,,,,2.24,1.41,1.73*15
$GNRMC,132253.00,A,6023.09790,N,00519.78375,E,0.073,,250921,,,A*60
$GNGGA,132253.00,6023.09790,N,00519.78375,E,1,11,1.18,54.4,M,43.8,M,,*77
$GNGSA,M,3,04,26,29,03,,,,,,,,,1.88,1.18,1.47*13
$GNGSA,M,3,74,65,66,67,76,82,83,,,,,,1.88,1.18,1.47*1A
$GNRMC,132254.00,A,6023.09783,N,00519.78363,E,0.149,,250921,,,A*6A
$GNGGA,132254.00,6023.09783,N,00519.78363,E,1,10,1.41,54.3,M,43.8,M,,*7F
$GNGSA,M,3,04,26,29,03,,,,,,,,,2.24,1.41,1.73*1D
$GNGSA,M,3,74,65,66,76,82,83,,,,,,,2.24,1.41,1.73*15
$GNRMC,132255.00,A,6023.09778,N,00519.78351,E,0.150,,250921,,,A*66
$GNGGA,132255.00,6023.09778,N,00519.78351,E,1,10,1.41,54.3,M,43.8,M,,*7B
$GNGSA,M,3,04,26,29,03,,,,,,,,,2.24,1.41,1.73*1D
$GNGSA,M,3,74,65,66,76,82,83,,,,,,,2.24,1.41,1.73*15
$GNRMC,132256.00,A,6023.09774,N,00519.78341,E,0.047,,250921,,,A*6F
$GNGGA,132256.00,6023.09774,N,00519.78341,E,1,10,1.41,54.3,M,43.8,M,,*75
$GNGSA,M,3,04,26,29,03,,,,,,,,,2.24,1.41,1.73*1D
$GNGSA,M,3,74,65,66,76,82,83,,,,,,,2.24,1.41,1.73*15
$GPGSV,4,1,14,02,40,298,21,03,19,112,19,04,60,084,29,06,57,235,*7B
$GPGSV,4,2,14,07,16,171,15,09,71,195,20,11,45,292,17,16,04,083,*7F
$GPGSV,4,3,14,19,03,226,,20,16,289,,22,01,115,,26,15,051,40*74
$GPGSV,4,4,14,29,08,355,37,31,04,024,*78
$GLGSV,3,1,09,65,23,079,41,66,84,016,28,67,36,264,,74,17,009,47*6D
$GLGSV,3,2,09,75,37,067,40,76,17,124,16,81,28,213,19,82,51,276,25*68
$GLGSV,3,3,09,83,28,334,20*5B
$GNRMC,132257.00,A,6023.09769,N,00519.78326,E,0.086,,250921,,,A*6E
$GNGGA,132257.00,6023.09769,N,00519.78326,E,1,10,1.41,54.3,M,43.8,M,,*79
$GNGSA,M,3,04,26,29,03,,,,,,,,,2.24,1.41,1.73*1D
$GNGSA,M,3,74,65,66,76,82,83,,,,,,,2.24,1.41,1.73*15
GPS/GNSS RECEIVER BACKGROUND INFORMATION
|