|
Past operations & data Scientific equipment
Communications / Navigation / Tracking
Weather Ship contact info VHF Radio Call Sign: Maintenance  Last update: December 27, 2024, at 09:41 AM |
MAP MACHINEINTRODUCTIONThe Map Machine reads GPS data from vessel network and uses Generic Mapping Tools (GMT) and the IBCAO bathy data set to produce maps in four resolutions at regular intervals. The maps track vessel position. In addition, the map machine program saves track data to file every 30 seconds. 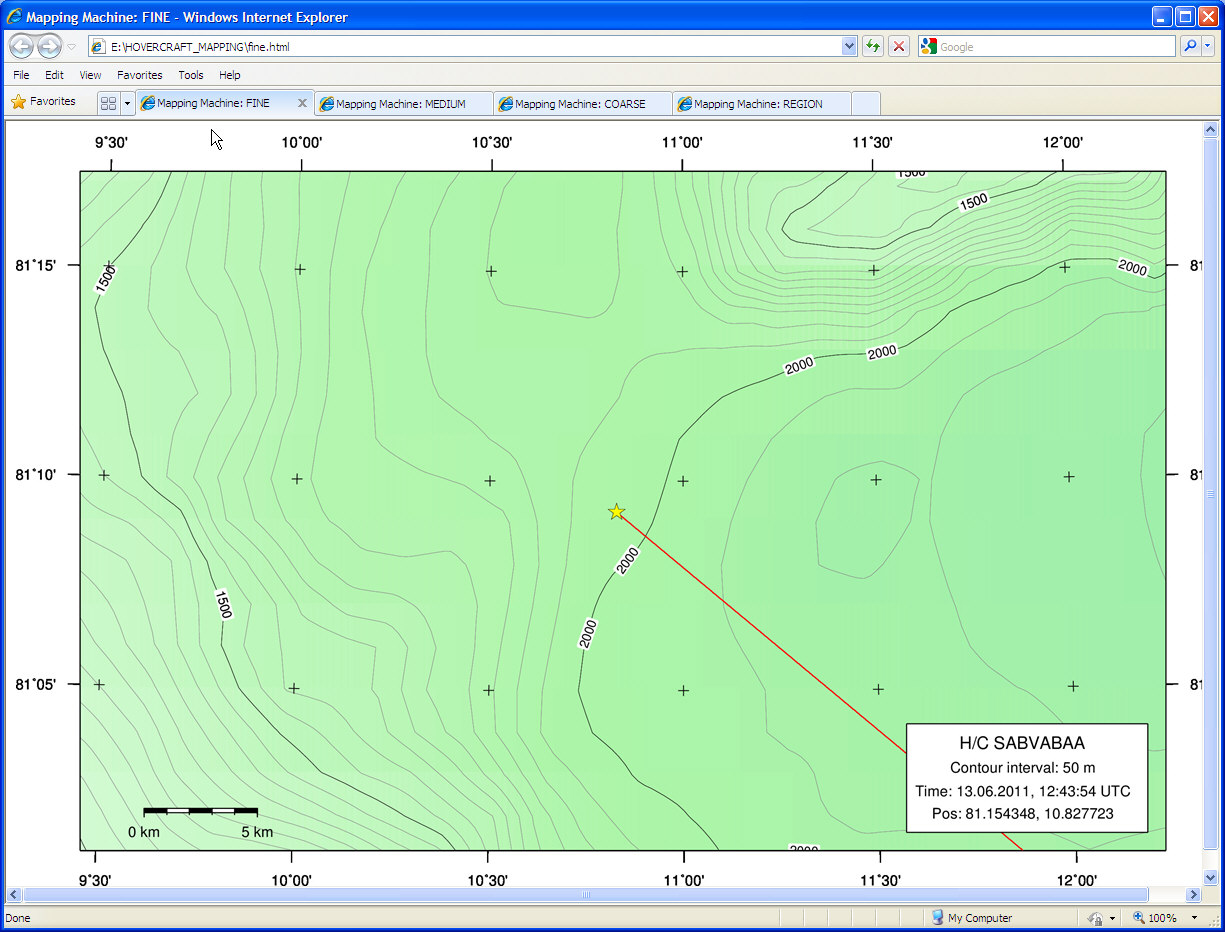 INSTALLATIONRequired programs
Both GMT and ImageMagick should modify the PATH environmental variable to include link to their executables. UtilitiesThese programs are not needed to run the mapping program, but are helpful in testing and development.
SOFTWARE DESIGNMapping software depend, of course, on GPS input. In our case, a separate program reads GPS data from USB or serial port, converts data into another format and transmits data as an UDP telegram over vessel network. The GPS program and mapping software can reside on the same computer, or on different computers - there is no need for configuration as the UDP telegrams are sent in broadcast mode, reaching all machines on the network. Telegrams from the GPS program can be used by different programs that all share a need for time- and navigation input. 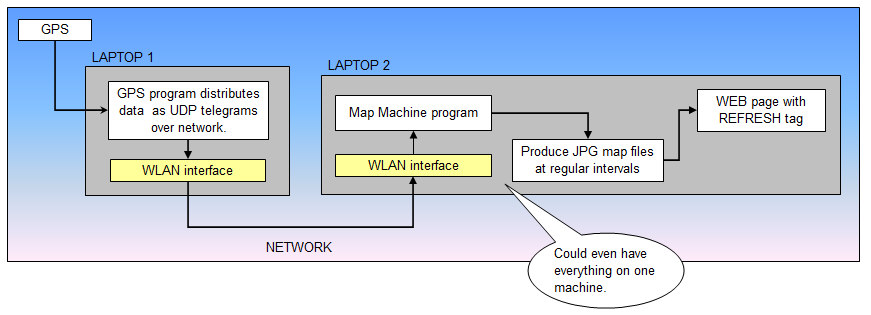 Map machine software structure (diagram Excel file). OPERATIONStart GPS simulator, for testingTest first mapping software by starting a GPS simulator. Open terminal window, cd to C:\HOVERCRAFT_MAPPING, and issue the command: python hovercraft.gps.class.py sim You should see: 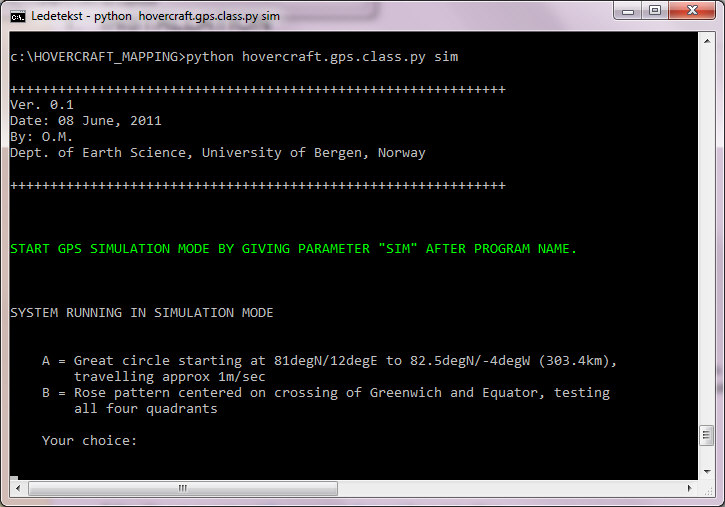 Select option A. The program then starts transmitting UDP broadcast telegrams: 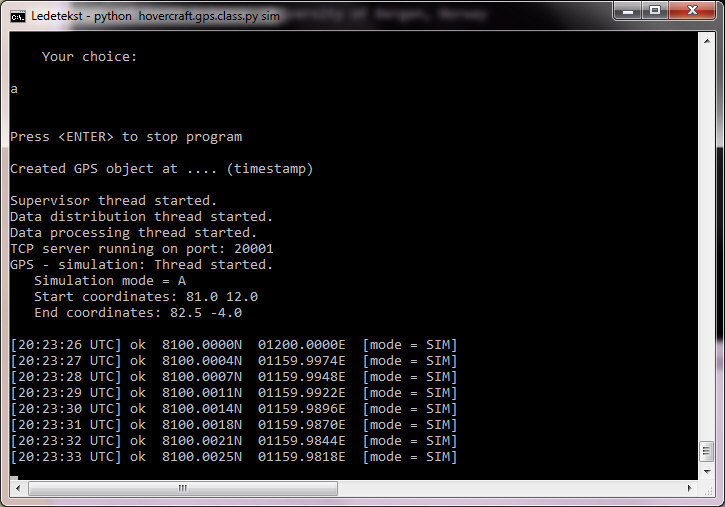 Start mapping softwareOpen new terminal window, cd to C:\HOVERCRAFT_MAPPING, and issue the command: python make-maps-zoomlevels.py The program will first create four maps from the ground up - a time consuming process; approx 1 minute per map. When the program redraws map later on, it operates on the top layer of the map, only updating current position and trackline (maps are produced in PostScript, building layer upon layer, and converted to JPG in the end). After a while, the mapping software enters normal mode. The interval between map regeneration is determined by settings in INI-file. There are two types of map regeneration: a) Only current position and trackline, and b) complete map. The interval between partial redraw is set in INI file. The interval between complete redraw is guided by the need to keep vessel in map center (more or less); the redraw threshold (in km) is set in INI file, and the vessel speed will of course determine how fast this threshold is reached. Next, open IE web browser. Startpage is set to show the four maps in separate tabs. Map with FINE resolution has shortest update interval (ref INI file). FIRST VERSION: OBSOLETE - KEPT FOR REFERENCEScreenshot below shows the first version of a combined map machine and instrument integration application, using a standard browser as user interface. A JavaScript library called JQuery was employed in developing this interface. Unfortunately, this library had a severe memory leak problem, causing the application to run very slowly after a couple of hours. It was uncertain if the leakage problem could be solved at all, so we had to switch to plan B ... 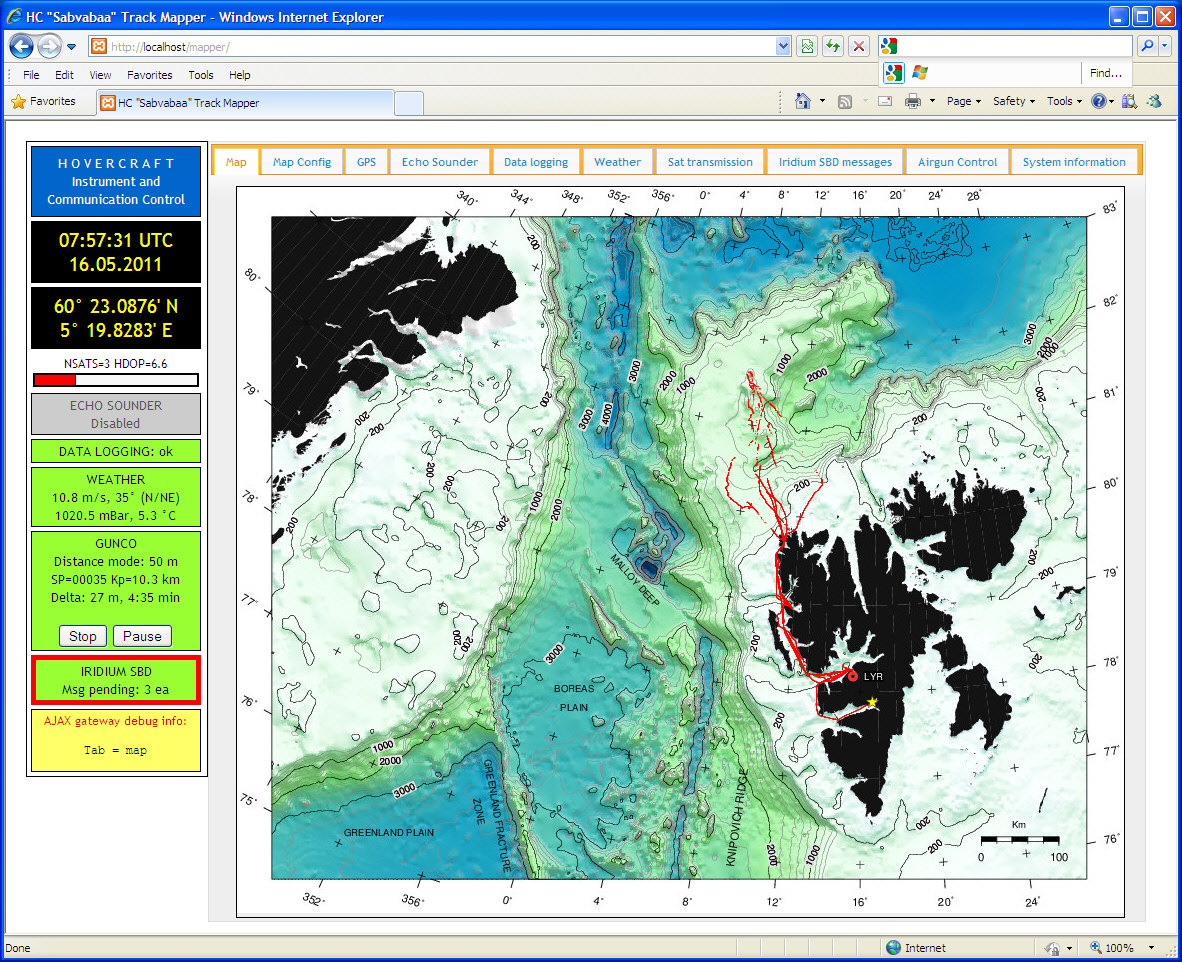 |