|
Past operations & data Scientific equipment
Communications / Navigation / Tracking
Weather Ship contact info VHF Radio Call Sign: Maintenance  Last update: December 27, 2024, at 09:41 AM |
SABVABAA - Inuit word meaning: "flows swiftly over it"A hovercraft dedicated to Arctic Ocean research  Sea trials at Southhampton VisionTo promote geomarine research in the Arctic Ocean by combining modern technology with the advantages of a drifting sea ice cover.
MotivationResearch in areas covered by sea ice is severely constrained by logistics. Only a few western icebreakers are able to penetrate into the central Arctic Ocean during the summer season while Russia has a number of capable vessels. The other option is use of aircraft landing on the ice during a narrow time window determined by return of daylight by mid-March extending through April-early May when persistent fog sets in and the summer melt starts to accelerate. Ship and aircraft operations are expensive and require extensive planning. There is, however a plethora of small, but nevertheless important scientific projects with modest logistic requirements such as deployment of drifting buoys for atmospheric and oceanographic measurements, measurements of sea ice thickness, oceanography of the upper part of the water column and geophysical imaging of the seabed and sub-bottom sediments. An example of this is expressed in the journal Hydro International LowBudgetHydrography.pdf. Present logistic opportunities in areas completely covered by sea ice severely limits what can be achieved while at the same time our recognition of a changing global climate accelerates our need to understand how the system works.
BackgroundDr. John K. Hall, a retired marine geophysicist with the Geological Survey of Israel, intends to explore the use of hovercraft as an alternative polar research platform. The concept was earlier laid out in a research proposal to the European Union Marine Science and Technology III program in March 1995 (http://www.geo.uib.no/hjemmesider/yngve/docs/Hovercraft_MAST_proposal.PDF). The project is a tribute to the memory of his parents and grandparents. John’s polar experience dates back to tours of duty over a period of 14 months during 1966-68 on U.S. scientific research station Fletcher’s Ice Island (T-3), an 6 km by 15 km and 25 m thick tabular sheet of glacial ice drifting around in the central Arctic Ocean. John’s PhD thesis (Hall-PhD-thesis.pdf) at Columbia University, New York in 1970 was based upon a wide range of oceanographic and geophysical measurements and geological sampling of the seafloor sediments carried out by Lamont Geological Observatory (http://www.ldeo.columbia.edu), as the island drifted under the influence of winds and currents. T-3 was first occupied during the International Geophysical Year in 1957 and manned until 1974. It exited through the Fram Strait sometime around 1984.  The T-3 camp on a 6 km x 15 km and 25 meter thick ice island in the Arctic Ocean. 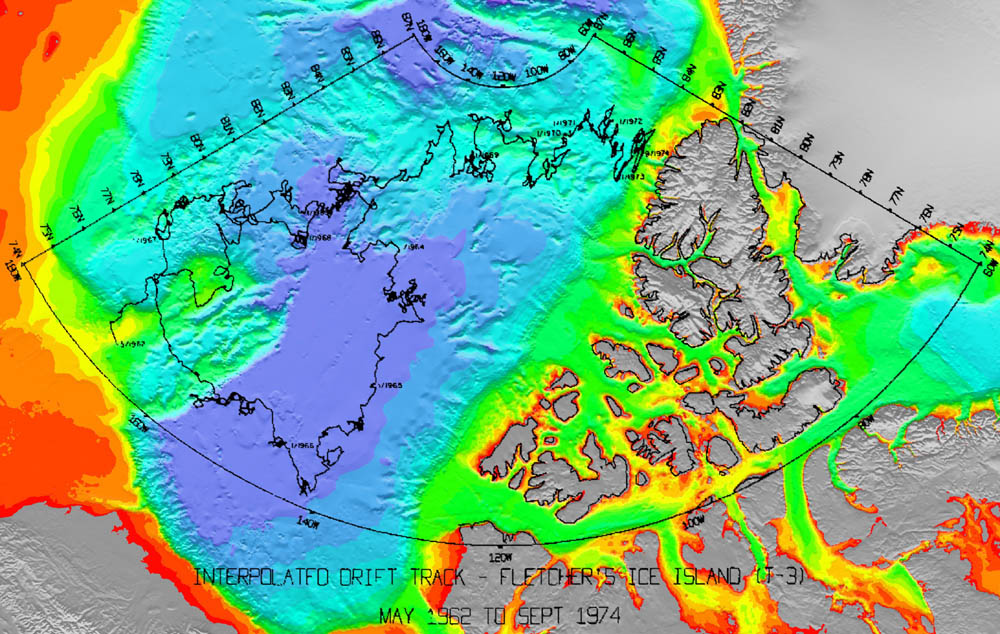 T-3 Drift Track.
Hovercraft – an alternative platform for polar researchA hovercraft rides over water and ice on a cushion of air exerting a pressure on the ground that is less than that of a seagull standing on one leg or 1/10 that of a human. Modern, medium sized hovercraft are powered by conventional diesel engines and carry payloads of 1-4 tons. Present use of hovercraft under arctic conditions include craft for coast guard operations over ice in the Gulf of Bothnia by Sweden, Finland and Estonia, service over ice to a drilling platform offshore Alaska, as well as past service to Eskimo communities in Alaska by the U.S. Postal Service.  Hovercraft factory testing October 2007.
The hovercraft SABVABAA has been designed as a research platform from the start. The 14 m2 cabin provides scientific work space, kitchen, sanitary facilities and sleeping space for 4 persons. Deck space amounts to 25 m2. The craft is equipped with long range tanks for an additional 1500 liters of fuel, which will give a total endurance of more than 50 hours at an economy cruise speed of 20 knots.  Cabin interior with work bench for computers and instruments (right) and space for seating/sleeping (left). The seats can be converted to beds. A small kitchen section is located on the starbord side behind the passenger seat.
 Cabin interior towards rear with work bench for computers and instruments (left) and space for seating/sleeping (right). The room in the rear contains another 2 beds athwart-ship
 A probe for continuous measurements of ice thickness (by AWI/Univ of Alberta) can be attached to the front of the hovercraft. An airgun compressor is located in the red square box on starboard deck about midship. On the port side will be an auxiliary power pack for 230 volt AC (6 kW) as well as hydraulic power to drive the sediment coring winch.
Area of operationThe hovercraft will only operate in areas covered by sea ice. Longyearbyen will serve as a base and supply point for missions north into the ice pack. Transit legs across variable distances of open water will be necessary to reach the ice edge.
Driving in pack iceIn general, an ice covered ocean is a fairly safe place. The ice cover is made up of a mosaic of ice floes of many different sizes. Young ice is smooth and even, but pressure ridges form in areas of compression. During a complete annual cycle, the ice surface melts about 0.5 meter on the top and about the same amount of ice freezes to the underside. Multi-year ice often forms an undulating smooth surface.
 Camp on sea ice at 85 degrees north in 2004. Note Twin Otter aircraft parked on the ice runway (right, middle). The camp is on 2.5 meter thick ice and the runway on 1 meter thick ice.
 Summer melt ponds near the North Pole in 2001.
Because of obstacles in the form of pressure ridges, we will be unable to maintain a straight course from point A to point B, but rather travel an estimated distance of 1.5-2 times the direct route. For comparison, the distance wheel trailing the dog sled on Wally Herbert's Trans-Arctic Expedition from Alaska to Svalbard in 1966 measured a distance 1.7 times the direct route. It is also worth noting that all diesel driven icebreakers operating in the Arctic Ocean principally follow criss-crossing open or partially open leads. Only rarely is a straight course through unbroken ice floes attempted as fuel comsumption will increase by 50-100%.
SafetyThe hovercraft is built to meet the Code of Safety for High Speed Hovercraft under the International Maritime Organization (IMO). It has a double hull and massive reserves of buoyancy. The craft remains floating at full payload with safe freeboard with nine of the twenty-eight compartments flooded. Most importantly, a ruptured bottom does not impair the craft's ability to hover on the air cushion and move over water or ice surfaces. Wave heights of 1 meter can be handled comfortably, but the craft is clearly not a vessel for routine open ocean operations. Emergency equipment includes survival suits for each person on board and a 6 man life raft in deck container to be supplemented by an extra raft if needed. Emergency location is by a Jotron Float Satellite Emergency Radio Beacon (EPIRB) in addition to a full suite of communication equipment (see below). The craft also carries a portable electric winch which can be mounted on the front or rear. The fact that a hovercraft moves at relatively low speed (less than 20-30 km/hr) and a small distance (0.7 meter) from the ice surface, means that it can traverse ice floes of any thickness, travel unobstructed across open leads and can park on the ice, while providing a heated shelter for its small crew (2-4). All these factors significantly reduce the risk of travel as compared to other means of transportation in the Arctic Ocean. Requiring only one person for operation, it also minimizes the number of personnel in these fragile Arctic environments.
Hovercraft and the environmentThe model 2000TD hovercraft is powered by a water-cooled 440 Hp Deutz diesel engine. The craft has a maximum speed over water of 35 knots and an economy speed of about 20 knots. Hover height is 0.7 meter. It consumes about 1.2 liter fuel per kilometer, i.e. less than 0.5% of an icebreaker. At rest, it sits on two skids, 5 cm wide and 10 m long. Measurements of air- and water-borne noise from a 2000TD hovercraft has been published by Blackwell and Greene, Jr. (2005) (Hover_noise1.pdf) and also measured by a consultant (The English Cogger Partnership) at the request of Griffon Hovercraft Ltd (Cogger_2000TD noise report.pdf). The highest sound levels from a hovercraft are in the frequency band 80-95 Hz. We may compare acoustic noise measurement from operation of a 2000TD like SABVABAA with sound levels of a Bell 206 Jet Ranger helicopter reported by Newman et al. (1985) (http://www.volpe.dot.gov/acoustics/pubs2.html). At a distance of 100 m, the noise levels from the 2000TD hovercraft are substantially lower than that from the Bell 206 Jet Ranger helicopter as shown in the figure below. Note that a difference of 6 dB in sound pressure is equivalent to a reduction of 50% in sound pressure amplitude. For comparison, the current EØS-rules define maximum noise level from a snowscooter to be 85 dB at 15 meter distance. Underwater noise levels from a Griffon 2000TD are also considerably lower than conventional vessels of comparable size (Hover_noise1.pdf). This aspect is also recognized in an updated impact assessment for offshore Alaska operations (Updated impact.pdf). The U.S Postal Service commissioned extensive environmental studies in connection with use of an API-88-80 hovercraft to deliver mail to remote villages in Alaska. The API-88 hovercraft has five times the engine power of the 2000TD. In these studies, the impacts of the API-88 on waterfowl and fish were characterized as insignificant (http://volpedb.volpe.dot.gov/outside/owa/work.view_proj?p_proj=PRJ00166). Monitoring of subsistence gill-netting and winter blackfish fishing also showed negligible impact.
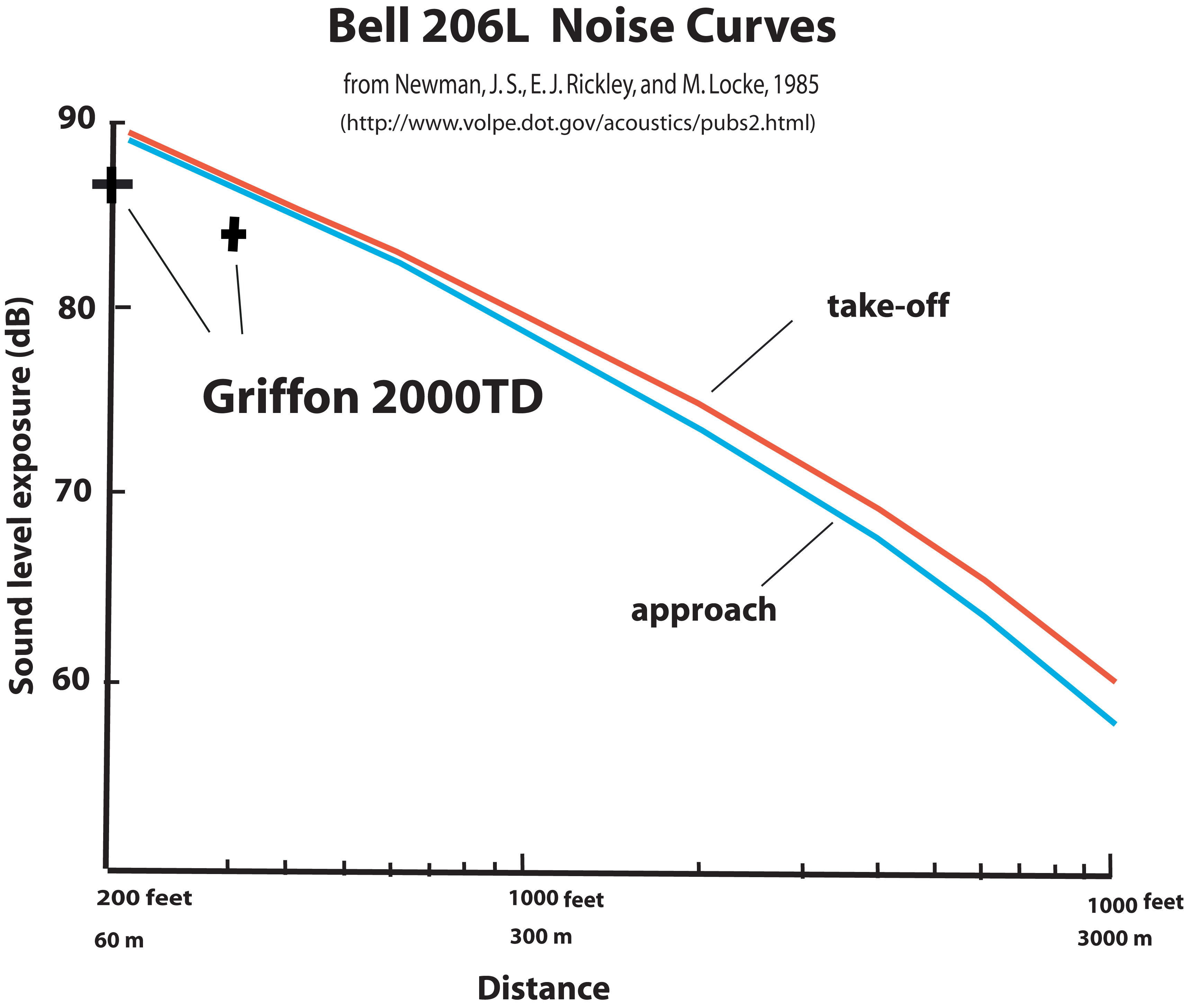 Noise measurements for a Griffon 2000TD hovercraft compared to a Bell 206 helicopter
Marine Seismic CapabilitiesEchosounders:
Seismic system:
Seafloor Sampling Capabilities
Geophysical/Oceanographic Measurements
Ice Drill
Electrical Power
Navigation
Communications
Other Equipment
ReferencesBlackwell, S. B. and C. R. Greene, Jr., 2005. Underwater and in-air sounds from a small hovercraft. J. Acoust. Soc. Am., 118(6), p. 3646-3652.
Newman, J. S., E. J. Rickley, and M. Locke, 1985. ICAO Helicopter Noise Measurement Repeatability Program U. S. Test Report Bell 206L-1 Noise Measurement Flight Test, September 1985, FAA-EE-85- 6
Click to see images |