|
Past operations & data
Scientific equipment
Communications / Navigation / Tracking
Weather
Ship contact info
VHF Radio Call Sign:
WDE4414
Iridium phone cockpit:
00 - 88 1677 72 7018
Iridium spare 1:
00 - 88 1621 41 8079
Iridium spare 2:
00 - 88 1621 44 3804
Emergency Beacon:
ID: ADE90 05931 C34D
Handheld Emergency Beacon:
ID: LC 4652
Hovercraft registered in Delaware, US:
DL 1519 AB
Maintenance
edit SideBar
Last update: December 27, 2024, at 09:41 AM
Version: pmwiki-2.3.38
|
|
HOVERCRAFT "SABVABAA"
SEISMIC PROFILING
| UNIVERSITY OF BERGEN
Department of Earth Science
Allé gt. 41, N-5007 Bergen, Norway
| |
|
|
|
|
|
|
| | 0.2
| Added 2024 season
| New laptop; new GUNCO software version; memo regarding GNSS-program if other receivers are used in the future.
| 27 Dec, 2024
| OM
| OM
| -
| | 0.1
| DRAFT
| -
| 14 July, 2022
| OM
| OM
| -
| | VER.
| STATUS
| CHANGE
| DATE
| BY
| CKD
| APPD
|
SURVEY 2024
Introduction
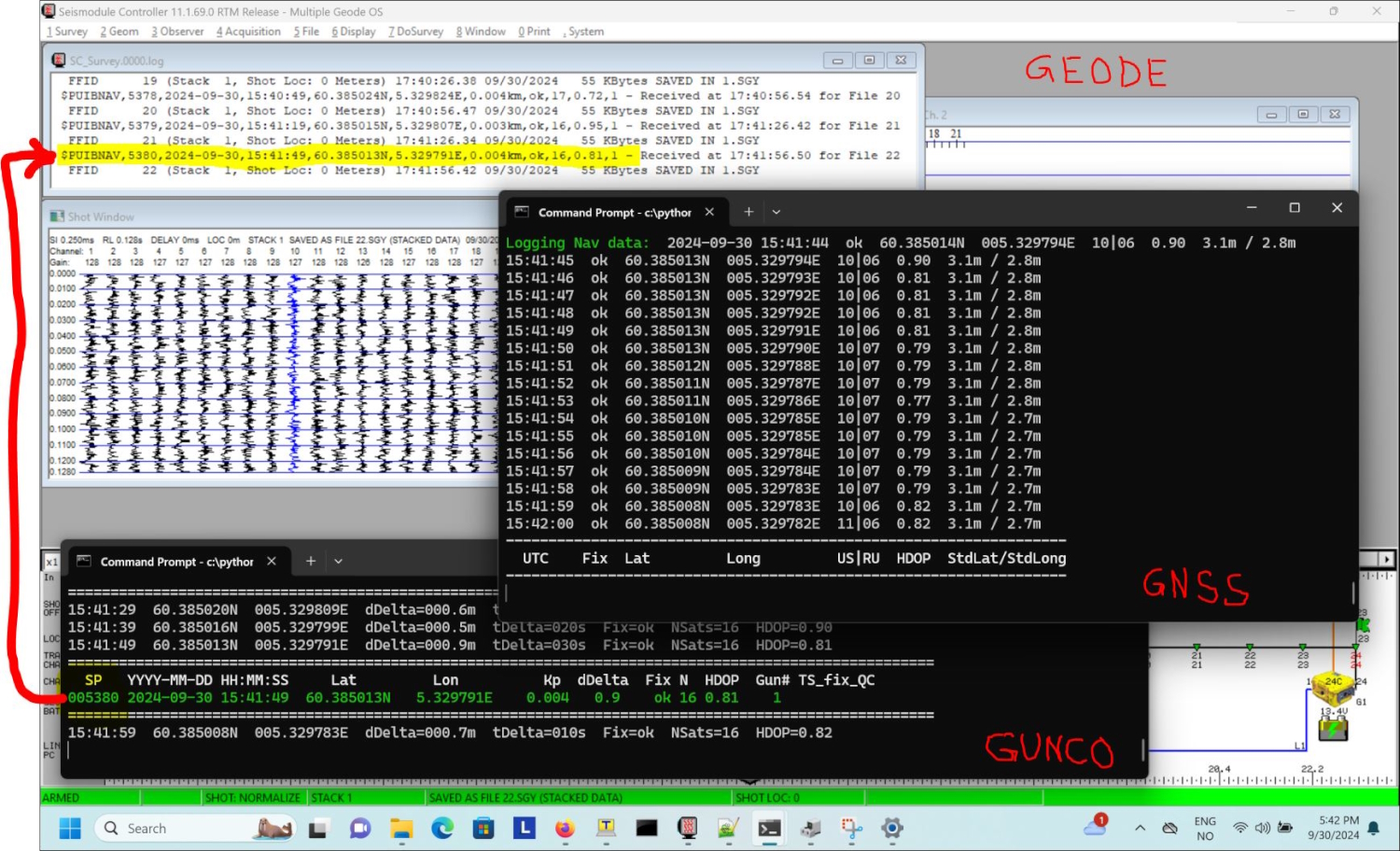
Screenshot of laptop that controls seismic data acquisition, including firing of Airgun Controller (GUNCO). Click to enlarge.
Screenshot shows three programs in operation:
- GNSS data reception & distribution on the right, incl survey logger: Nav data distributed as UDP telegrams (JSON formatted), so there can be many listeners;
- GUNCO software on the lower left. Here, you select shooting mode: Triggering on DISTANCE, TIME or MANUAL (by pressing CTRL+T;
- GEODE recording in the background, merging serial data received from GUNCO program with GEODE log entry so recording number (FFID) can be tied to shotpoint number (otherwise you need to record this information manually in a logbook).
Photo of test bench.
New laptop Lenovo mod Yoga Pro 7
Desktop icons. Click to enlarge.

Lenovo mod Yoga Pro 7 14AHP9. Click to enlarge.
|
- Lenovo mod Yoga Pro 7 14AHP9
- Manuals, at Lenovo site for Yoga Pro 7 14AHP9: Link
- Serial Number: YX0AK9B7
- Product number: 83E3000HMX
- Bios Version: NCCN16WW
- Supplier:
- Ports:
- 2 ea USB-C
- 1 ea USB-A, ver 3.0
- HDMI
- So port expansion adapter required, since we need Ethernet (for GEODE) and three USB-A ports (for GUNCO RS232, GEODE RS232 and GNSS Receiver)
| 
Lenovo mod Yoga Pro 7 Power Supply for 230Vac input. Click to enlarge.
| Output:
- 20.0VDC / 5.0A - 100.0W
- 15.0VDC / 3.0A
- 9.0VDC / 3.0A
- 5.0VDC / 3.0A - 15W
| 
Lenovo 12Vdc charger art.no.: 40AK0065WW. Click to enlarge.
| LENOVO Power supplies for 12Vdc input -- suppliers:
|
Tips & Tricks, during setup
During initial WIN11 setup, the Yoga Pro 7 asks for either login to existing Microsoft account, or creation of a new account. But we want only a local account on the machine. After all, this a for field use. Credits to Ø.N. for finding a way around:
- Disable the Internet connection before starting the installation. To do this, you can disconnect the LAN cable or disable Wi-Fi.
- Windows will show you the “Let’s connect to a network” or similar screen. The upcoming Windows 11 version 22H2 no longer allows you to skip this step to create a local account.
- On the screen that appears, press Shift + F10 to open a command prompt window. NOTE: Press <Function = Fn>+F10 -- otherwise, top symbol action shown on F10 key is selected, so no command window will appear ...
- Type “OOBE\BYPASSNRO” (without the quotation marks) and press the Enter key.
- Windows will automatically restart and return to the “Let’s connect you to a network” screen. Only this time you can select “I don’t have Internet” to skip this step.
- Then select “Continue with limited configuration” to create a local account during configuration.
Port expansion adapter / RS232 adapters

Plexgear Multiadapter for USB-C with 9 expansion ports. Click to enlarge.
Port expansion:
- Plexgear Multiadapter for USB-C with 9 expansion ports, including Ethernet (required for GEODE operation)
- Supplier: Kjell & Co, art.no. 62099
| 
| 
Startech mod. ICUSB232V2
|
- RS232 adapter that works under WIN11
- Startech mod. ICUSB232V2
- Suppliers:
- Option? Check if it works under WIN11:
|
GNSS Receiver "Navilock NL-8004U u-blox 8" (P/N: 62531)
Specifications, chip set information incl. NMEA telegram description
NMEA Telegrams from Navilock model NL-8004U (P/N: 62531)
Chipset is u-blox UBX-M8030. References:
| Data sample from Navilock NL-8004U:
1st record, only at the beginning (when opening COM-port):
$GNTXT,01,01,02,u-blox AG - www.u-blox.com*4E
$GNTXT,01,01,02,HW UBX-M8030 00080000*60
$GNTXT,01,01,02,ROM CORE 3.01 (107888)*2B
$GNTXT,01,01,02,FWVER=SPG 3.01*46
$GNTXT,01,01,02,PROTVER=18.00*11
$GNTXT,01,01,02,GPS;GLO;GAL;BDS*77
$GNTXT,01,01,02,SBAS;IMES;QZSS*49
$GNTXT,01,01,02,GNSS OTP=GPS;GLO*37
$GNTXT,01,01,02,LLC=FFFFFFFF-FFFFFFED-FFFFFFFF-FFFFFFFF-FFFFFFE9*50
$GNTXT,01,01,02,ANTSUPERV=AC SD PDoS SR*3E
$GNTXT,01,01,02,ANTSTATUS=OK*25
$GNTXT,01,01,02,PF=3FF*4B
Subsequent records:
$GNRMC,120136.00,A,6023.10268,N,00519.78150,E,0.050,,030320,,,A*62
$GNVTG,,T,,M,0.050,N,0.093,K,A*32
$GNGNS,120136.00,6023.10268,N,00519.78150,E,AA,18,0.73,75.0,43.8,,*53
$GNGGA,120136.00,6023.10268,N,00519.78150,E,1,12,0.73,75.0,M,43.8,M,,*73
$GNGSA,A,3,24,17,19,12,15,10,28,20,01,13,,,1.87,0.73,1.72*17
$GNGSA,A,3,75,66,74,84,76,83,67,85,,,,,1.87,0.73,1.72*19
$GPGSV,3,1,12,01,14,011,40,10,25,282,27,12,38,217,25,13,07,153,09*73
$GPGSV,3,2,12,15,26,178,10,17,40,070,41,19,41,102,27,20,10,253,11*78
$GPGSV,3,3,12,24,78,225,21,25,06,230,21,28,16,057,42,32,19,314,06*76
$GLGSV,3,1,10,65,26,211,,66,49,293,25,67,15,342,34,74,33,075,39*6D
$GLGSV,3,2,10,75,84,306,21,76,32,262,16,83,19,006,27,84,36,070,37*66
$GLGSV,3,3,10,85,12,126,20,,,,46*5F
$GNGLL,6023.10268,N,00519.78150,E,120136.00,A,A*7C
$GNGST,120136.00,3326643,,,,4.1,1.9,7.2*73
$GNZDA,120136.00,03,03,2020,00,00*7F
$GNRMC,120137.00,A,6023.10269,N,00519.78144,E,0.061,,030320,,,A*65
$GNVTG,,T,,M,0.061,N,0.113,K,A*39
$GNGNS,120137.00,6023.10269,N,00519.78144,E,AA,16,1.11,74.9,43.8,,*55
$GNGGA,120137.00,6023.10269,N,00519.78144,E,1,12,1.11,74.9,M,43.8,M,,*7B
$GNGSA,A,3,24,17,19,12,10,28,01,13,,,,,2.82,1.11,2.60*12
$GNGSA,A,3,75,66,74,84,76,83,67,85,,,,,2.82,1.11,2.60*1A
$GPGSV,3,1,12,01,14,011,40,10,25,282,27,12,38,217,25,13,07,153,10*7B
$GPGSV,3,2,12,15,26,178,07,17,40,070,41,19,41,102,26,20,10,253,09*76
$GPGSV,3,3,12,24,78,225,22,25,06,230,21,28,16,057,42,32,19,314,12*70
$GLGSV,3,1,10,65,26,211,,66,49,293,26,67,15,342,34,74,33,075,39*6E
$GLGSV,3,2,10,75,84,306,19,76,32,262,18,83,19,006,27,84,36,070,37*63
$GLGSV,3,3,10,85,12,126,21,,,,46*5E
$GNGLL,6023.10269,N,00519.78144,E,120137.00,A,A*79
$GNGST,120137.00,24,,,,4.1,1.9,7.1*42
$GNZDA,120137.00,03,03,2020,00,00*7E
$GNRMC,120138.00,A,6023.10270,N,00519.78142,E,0.053,,030320,,,A*65
$GNVTG,,T,,M,0.053,N,0.098,K,A*3A
$GNGNS,120138.00,6023.10270,N,00519.78142,E,AA,17,0.79,74.8,43.8,,*5B
$GNGGA,120138.00,6023.10270,N,00519.78142,E,1,12,0.79,74.8,M,43.8,M,,*74
$GNGSA,A,3,24,17,19,12,15,10,28,01,13,,,,2.17,0.79,2.02*11
$GNGSA,A,3,75,66,74,84,76,83,67,85,,,,,2.17,0.79,2.02*1D
$GPGSV,3,1,12,01,14,011,40,10,25,282,27,12,38,217,25,13,07,153,12*79
$GPGSV,3,2,12,15,26,178,12,17,40,070,41,19,41,102,25,20,10,253,08*70
$GPGSV,3,3,12,24,78,225,22,25,06,230,21,28,16,057,42,32,19,314,07*74
$GLGSV,3,1,10,65,26,211,,66,49,293,26,67,15,342,34,74,33,075,39*6E
$GLGSV,3,2,10,75,84,306,16,76,32,262,20,83,19,006,27,84,36,070,36*66
$GLGSV,3,3,10,85,12,126,21,,,,45*5D
$GNGLL,6023.10270,N,00519.78142,E,120138.00,A,A*78
$GNGST,120138.00,443098,,,,4.0,1.9,7.1*48
$GNZDA,120138.00,03,03,2020,00,00*71
| RMC -- Recommended Minimum Data
Example:
$GNRMC,120136.00,A,6023.10268,N,00519.78150,E,0.050,,030320,,,A*62
$xxRMC,time,status,lat,NS,lon,EW,spd,cog,date,mv,mvEW,posMode,navStatus*cs<CR><LF>
where:
status: V = Data invalid, A = Data valid
spd: Speed over ground [knots]
cog: Course over ground [degrees]
mv: Magnetic variation value. Only supported in ADR 4.10 and later
mvEW: Magnetic variation E/W indicator. Only in ADR 4.10 and later
posMode: Mode Indicator
N = No fix
E = Estimated/Dead reckoning fix
A = Autonomous GNSS fix
D = Differential GNSS fix
F = RTK float
R = RTK fixed
navStatus: Navigational status indicator
V = Equipment is not providing navigational status information,
fixed field, only available in NMEA 4.10 and later
| GNS -- GNSS fix data
Example:
$GNGNS,120136.00,6023.10268,N,00519.78150,E,AA,18,0.73,75.0,43.8,,*53
$xxGNS,time,lat,NS,lon,EW,posMode,numSV,HDOP,alt,sep,diffAge,diffStation,navStatus*cs<CR><LF>
where:
posMode: Positioning mode, see position fix flags description.
1st character for GPS, 2nd character for GLONASS,
3rd character for Galileo, 4th character for BeiDou
alt: Altitude above mean sea level
sep: Geoid separation: difference between ellipsoid and mean sea level
diffAge: Age of diff corrections [seconds], null when DGPS is not used
diffStation: ID of station providing diff corrections, null when DGPS is not used
navStatus: Navigational status indicator
V (Equipment is not providing navigational status information,
fixed field, only available in NMEA 4.10 and later)
| GGA -- Global positioning system fix data
Example:
$GNGGA,120136.00,6023.10268,N,00519.78150,E,1,12,0.73,75.0,M,43.8,M,,*73
The NMEA specification indicates that the GGA message is GPS specific. However, when the receiver is configured for multi-GNSS, the GGA message contents will be generated from the multi-GNSS solution. For multi-GNSS use, it is recommended that the NMEA-GNS message is used instead.
$xxGGA,time,lat,NS,lon,EW,quality,numSV,HDOP,alt,altUnit,sep,sepUnit,diffAge,diffStation*cs<CR><LF>
where:
quality: Quality indicator for position fix, see position fix flags description [1]
0 = No fix
1 = Autonomous GNSS fix
2 = Differential GNSS fix
4 = RTK fixed
5 = RTK float
6 = Estimated/Dead reckoning fix
| GSA -- GNSS DOP and Active Satellites
Example:
$GNGSA,A,3,24,17,19,12,15,10,28,20,01,13,,,1.87,0.73,1.72*17
$GNGSA,A,3,75,66,74,84,76,83,67,85,,,,,1.87,0.73,1.72*19
- If less than 12 SVs are used for navigation, the remaining fields are left empty. If more than 12 SVs are used for navigation, only the IDs of the first 12 are output.
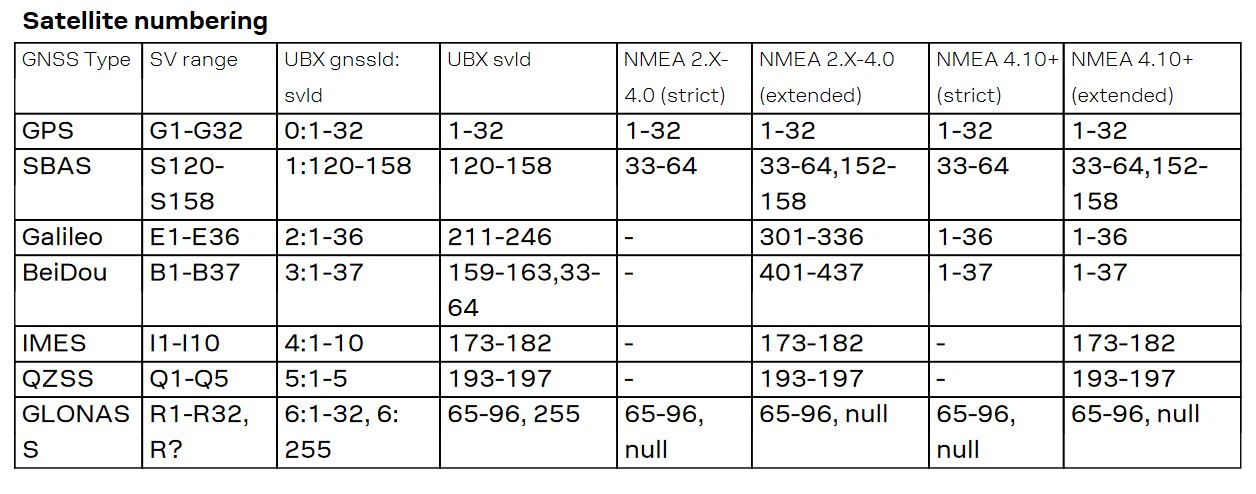
- The SV numbers (fields 'svid') are in the range of 1 to 32 for GPS satellites, and 33 to 64 for SBAS satellites (33 = SBAS PRN 120, 34 = SBAS PRN 121, and so on).
- In a multi-GNSS system this message will be output multiple times, once for each GNSS.
$xxGSA,opMode,navMode{,svid},PDOP,HDOP,VDOP,systemId*cs<CR><LF>
where:
opMode: Operation mode:
M = Manually set to operate in 2D or 3D mode
A = Automatically switching between 2D or 3D mode
navMode: Navigation mode, see position fix flags description [1]
Possible values for navMode:
1 = No fix
2 = 2D fix
3 = 3D fix
svid: Space Vehicle ID - Start of repeated block (12 times)
PDOP: Position dilution of precision
HDOP: Horizontal dilution of precision
VDOP: Vertical dilution of precision
systemId: NMEA defined GNSS System ID, see Signal Identifiers table [2]
Only available in NMEA 4.10 and later
| GST -- GNSS Pseudo Range Error Statistics
Example:
$GNGST,120136.00,3326643,,,,4.1,1.9,7.2*73
This message reports statistical information on the quality of the position
solution.
$xxGST,time,rangeRms,stdMajor,stdMinor,orient,stdLat,stdLong,stdAlt*cs<CR><LF>
where:
rangeRms: RMS value of the standard deviation of the ranges [meter]
stdMajor: Standard deviation of semi-major axis (only in ADR 4.10 and later)
stdMinor: Standard deviation of semi-minor axis (only in ADR 4.10 and later)
orient: Orientation of semi-major axis (only in ADR 4.10 and later)
stdLat: Standard deviation of latitude error [meter]
stdLong: Standard deviation of longitude error [meter]
stdAlt: Standard deviation of altitude error [meter]
| ZDA -- Time and Date
Example:
$GNZDA,120136.00,03,03,2020,00,00*7F
$xxZDA,time,day,month,year,ltzh,ltzn*cs<CR><LF>
where:
ltzh: Local time zone hours: 00 (fixed field)
ltzn: Local time zone minutes: 00 (fixed field)
|
[1] Position fix flags description
[2] Signal Identifiers table
Memorandum regarding future use of other GNSS receivers then Navilock NL-8004U u-blox 8" (P/N: 62531)
27 Dec, 2024:
The GNSS program seeks to determine last NMEA telegram in the batch of such telegrams, transmitted every second. The GNSS receiver we currently use -- Navilock NL-8004U u-blox 8" (P/N: 62531) -- seems to always terminate each one-second-block with $GNZDA telegram.
However, the program will fail with a GNSS receiver that does NOT terminate each block by a specific telegram. Also, if telegram that is flagged as the last one is actually sent several times, problems will occur. The data sample from GlobalSat BU-353W10 GNSS receiver (below) demonstrates both of these situations:
- $GPGSV telegrams are sent every five second;
- $GNGSA, which the program will identify as the last in one-second-batch, is transmitted twice (one for GPS- and then for GLONASS satellites).
Data sample from GlobalSat BU-353W10 GNSS receiver (no longer in production - see alternatives):
$GNRMC,083557.00,A,6023.08859,N,00519.76640,E,0.408,,261224,,,A*6A
$GNGGA,083557.00,6023.08859,N,00519.76640,E,1,06,4.50,40.7,M,43.8,M,,*70
$GNGSA,M,3,07,08,27,30,,,,,,,,,5.64,4.50,3.40*18
$GNGSA,M,3,85,76,,,,,,,,,,,5.64,4.50,3.40*1D
$GNRMC,083558.00,A,6023.08793,N,00519.76586,E,0.632,,261224,,,A*6E
$GNGGA,083558.00,6023.08793,N,00519.76586,E,1,06,4.50,40.0,M,43.8,M,,*78
$GNGSA,M,3,07,08,27,30,,,,,,,,,5.64,4.50,3.40*18
$GNGSA,M,3,85,76,,,,,,,,,,,5.64,4.50,3.40*1D
$GPGSV,3,1,12,05,42,210,,07,18,070,15,08,17,035,34,13,78,247,14*73
$GPGSV,3,2,12,14,46,133,13,15,45,284,,18,20,296,,20,15,189,*74
$GPGSV,3,3,12,23,15,324,18,24,01,247,,27,09,003,22,30,51,083,24*70
$GLGSV,3,1,09,66,23,135,,67,77,157,,68,46,307,,76,45,049,29*64
$GLGSV,3,2,09,77,70,147,,78,18,201,,83,03,272,,84,24,329,15*64
$GLGSV,3,3,09,85,15,023,25*53
$GNRMC,083559.00,A,6023.08784,N,00519.76688,E,0.513,,261224,,,A*64
$GNGGA,083559.00,6023.08784,N,00519.76688,E,1,06,4.50,39.6,M,43.8,M,,*7A
$GNGSA,M,3,07,08,27,30,,,,,,,,,5.64,4.50,3.40*18
$GNGSA,M,3,85,76,,,,,,,,,,,5.64,4.50,3.40*1D
$GNRMC,083600.00,A,6023.08805,N,00519.76754,E,0.237,,261224,,,A*6C
$GNGGA,083600.00,6023.08805,N,00519.76754,E,1,06,4.50,39.7,M,43.8,M,,*72
$GNGSA,M,3,07,08,27,30,,,,,,,,,5.64,4.50,3.40*18
$GNGSA,M,3,85,76,,,,,,,,,,,5.64,4.50,3.40*1D
$GNRMC,083601.00,A,6023.08781,N,00519.76677,E,0.601,,261224,,,A*6F
$GNGGA,083601.00,6023.08781,N,00519.76677,E,1,06,4.50,39.3,M,43.8,M,,*74
$GNGSA,M,3,07,08,27,30,,,,,,,,,5.64,4.50,3.40*18
$GNGSA,M,3,85,76,,,,,,,,,,,5.64,4.50,3.40*1D
$GNRMC,083602.00,A,6023.08770,N,00519.76768,E,0.488,,261224,,,A*6E
$GNGGA,083602.00,6023.08770,N,00519.76768,E,1,06,4.50,38.8,M,43.8,M,,*7C
$GNGSA,M,3,07,08,27,30,,,,,,,,,5.64,4.50,3.40*18
$GNGSA,M,3,85,76,,,,,,,,,,,5.64,4.50,3.40*1D
$GNRMC,083603.00,A,6023.08777,N,00519.76901,E,0.507,,261224,,,A*6F
$GNGGA,083603.00,6023.08777,N,00519.76901,E,1,06,4.50,38.8,M,43.8,M,,*7B
$GNGSA,M,3,07,08,27,30,,,,,,,,,5.63,4.50,3.40*1F
$GNGSA,M,3,85,76,,,,,,,,,,,5.63,4.50,3.40*1A
$GPGSV,3,1,12,05,42,210,,07,18,070,17,08,17,035,33,13,78,247,15*77
$GPGSV,3,2,12,14,46,133,12,15,45,284,,18,20,296,,20,15,189,*75
$GPGSV,3,3,12,23,15,324,17,24,01,247,,27,09,003,21,30,51,083,25*7D
$GLGSV,3,1,09,66,23,135,,67,77,157,,68,46,307,,76,45,049,29*64
$GLGSV,3,2,09,77,70,147,,78,18,201,,83,03,272,,84,24,329,14*65
$GLGSV,3,3,09,85,15,023,25*53
$GNRMC,083604.00,A,6023.08798,N,00519.77007,E,0.425,,261224,,,A*66
$GNGGA,083604.00,6023.08798,N,00519.77007,E,1,06,4.50,38.9,M,43.8,M,,*72
$GNGSA,M,3,07,08,27,30,,,,,,,,,5.63,4.50,3.39*11
$GNGSA,M,3,85,76,,,,,,,,,,,5.63,4.50,3.39*14
Finding and un-installing registered, but unused, COM ports
Quoting from this source:
- First up, you'll have to open up a Command Prompt and in Windows 11 it has to be run as administrator. Open up the start menu and start typing in "Command" until the black C:\ icon appears. Right click and select Run as Administrator. If you have some other version of Windows, you may not have to run as admin.
- Now type in
set devmgr_show_nonpresent_devices=1 (which is the magic command to show ghost devices) followed by start devmgmt.msc (which starts up the device manager).
- Select "Show hidden devices" from the View menu.
- You can now see every COM port you've ever made, and you can also now select which ones you want to uninstall so the COM port number can be recycled.
Geode Exploration Seismograph
Hardware / manual / trigger input

Geode Exploration Seismograph
|
- Manufacturer: Geometrics
- Product description: Link
- Manual: PDF, Rev. M, Software Ver. 9.30
- Seismodule Controller Software (SCS) -- SCS_Installation.zip
- 27 Sep, 2024: GEODE reg no.: L5C6-8A24-1154
- Email: seismicsupport@mail.geometrics.com
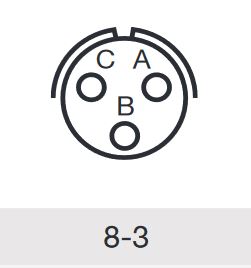
Pin-out Trigger input -- called "Start Connector" in manual:
From Geode Manual page 203:
The start or trigger connector is a 3-pin connector manufactured by Bendix and others. The mating connector, used on the standard hammer switch, HVB-1 blasters, and the hammer switch extension cable is a PT06A-8-3P(SR) (Geometrics part no. 21-206-003).
Pin Use:
- A: Trigger input
- B: Common
- C: Not used
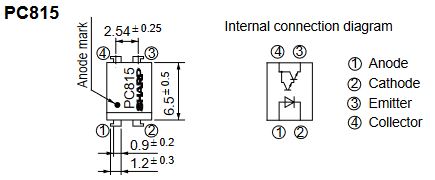
Opto-Coupler interface to trigger input, using Sharp PC815
|
Where are log files located?
By default, GEODE log files are placed in this directory:
C:\GeometricsSurveysAndSettings\SC\Survey Parameters
Survey software / GUNCO control program
Screenshot Survey software / GUNCO control
Start of survey software / GUNCO control program. Click to enlarge.
Starting GUNCO and GNSS Distributor programs
Run the programs in separate terminal windows:
Terminal window #1:
cd c:\HOVERCRAFT_GPS_2024
c:\python27\python .\hovercraft-GNSS-ver3-2020-07-13.py
Terminal window #2:
cd c:\HOVERCRAFT_GUNCO_2024
c:\python27\python .\gunco-ver4-2022-07-13.py
Serial string exported for GEODE input: Format
- Starts with $PUIBNAV, then follows:
- Year-Month-Day
- Hours:Minutes:Seconds
- Lat, NS_Hemisphere
- Lon, EW_Greenwich
- Kp (Kilometer post)
- GNSS: FixType
- GNSS: N_SATS (number of satellites used in fix)
- GNSS: HDOP (horizontal dilution of precision)
- Gun_number (1 or 2, if shooting flip-flop)
SURVEY 2022
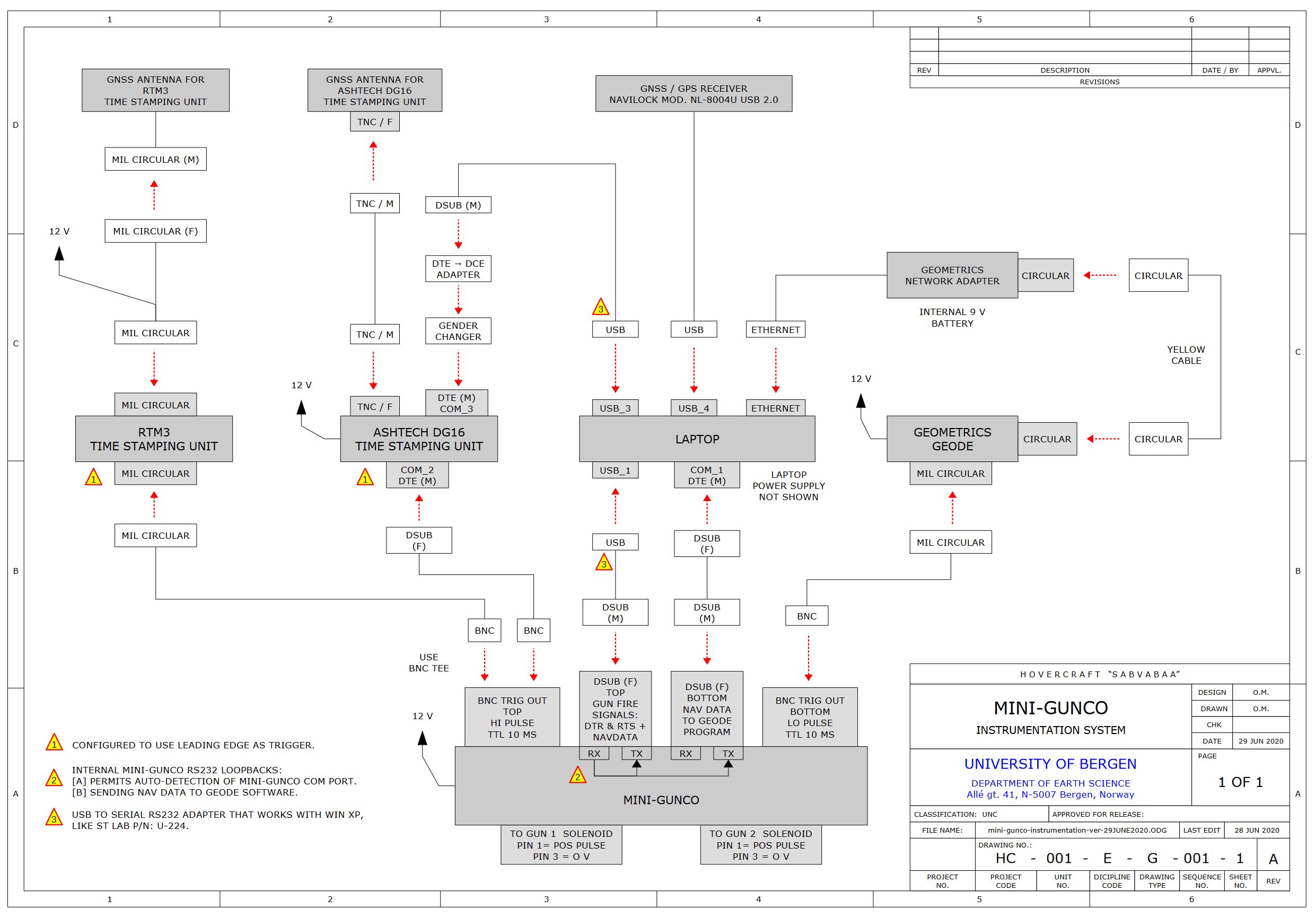
Instrumentation diagram
Drawing No. HC-001-E-G-001-1, Rev-A. Click to open PDF version.
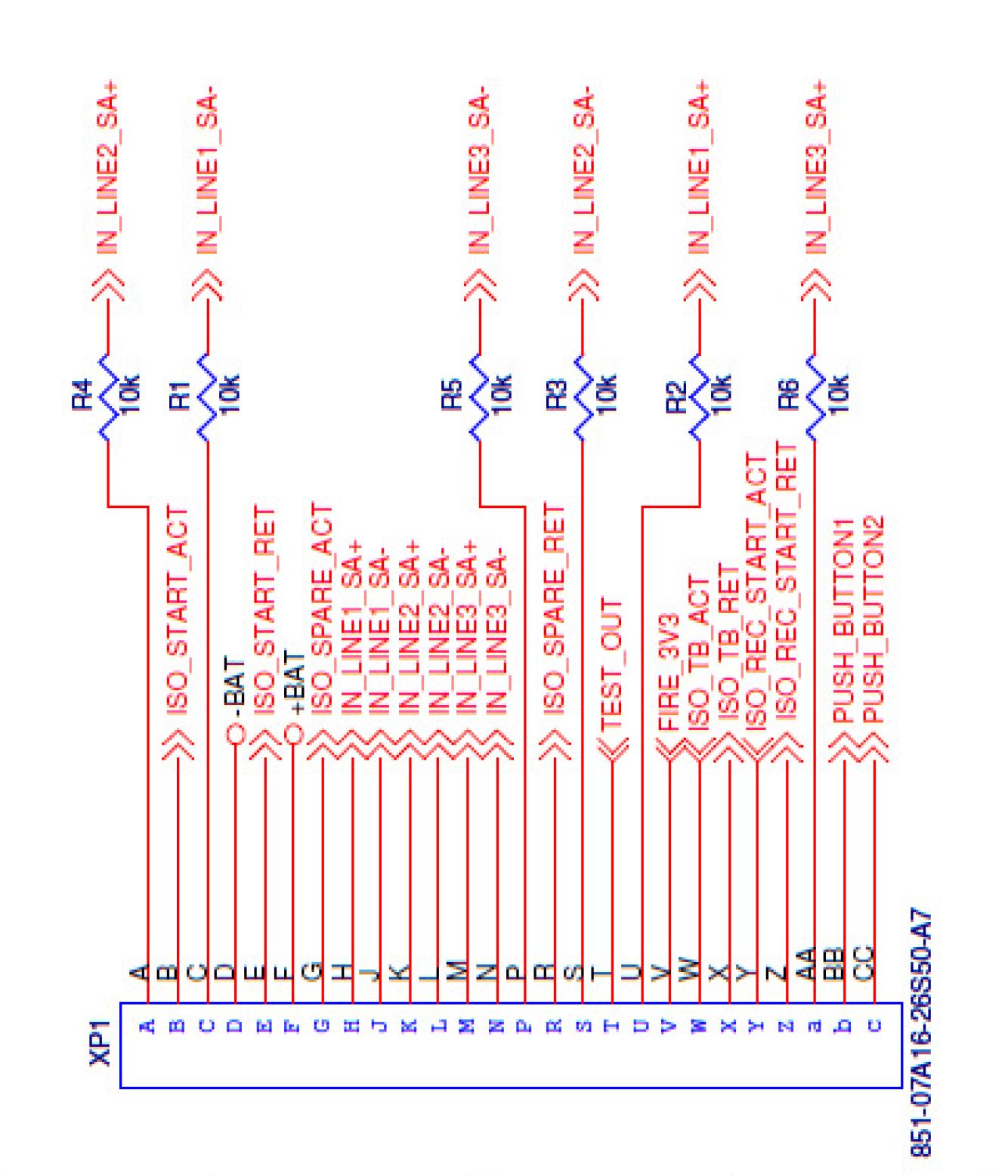
RTM3 Trigger interface
Chassis connector, RTM3
- 26-pin F
- Model: Souriau 851-07A16-26S50-A7
Internal wiring, RTM3 trigger connector. Source: RTM3 manual.
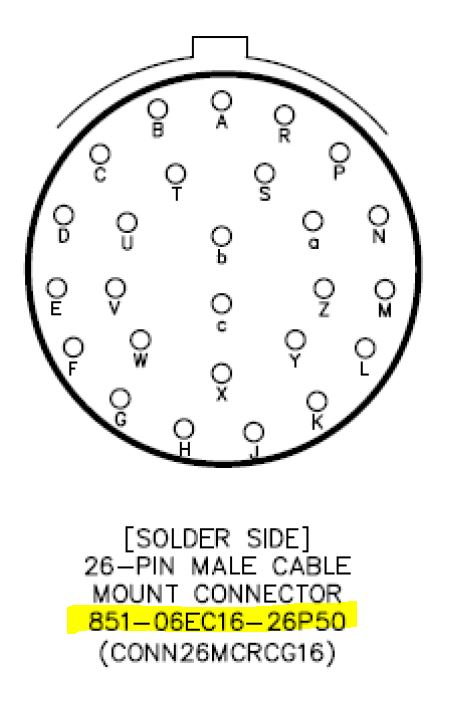
| Matching cable connector:
- 26-pin M
- Model: Souriau 851-06EC16-26P50
- Supplier: RS, stock no: 687-6673: "Souriau, 851 26 Way Cable Mount MIL Spec Circular Connector Plug, Pin Contacts,Shell Size 16, Bayonet Coupling"
From RTM3 manual, section 12.1 "Breakout Box Diagram"
|
From RTM3 manual: RTM3 time stamp trigger input -- G = center coax; R = coax shield. Click to enlarge.
Backup: Installing all software on Win 11 laptop
In order to prepare for future replacement of main seismic computer -- a 2008 vintage Dell Latitude D630 laptop running WinXP -- we attempted to install all software on a modern laptop.
New laptop: Dell Latitude 7420
- Laptop: Dell Latitude 7420
- Power input: USB-C
- Ethernet port: No (only WLAN). GEODE program requires Ethernet port for communication with the GEODE seismograph, so a solution must be found.
- USB-A port: 1 ea
- USB-C port: 1 ea
- HDMI port: Yes
- OS: WIN11
Adapters used
- 4-port RS232 hub, from USB-A
- 4-port USB-A hub, from USB-C
- Plexgear Portable 420 USB 3.0-hub 4-way
- Supplier: Kjell & Co, P/N: 69515
- Ethernet adapter, from USB-A
- LevelOne, mod USB-0301 (H/W Ver: 1.0)
- Supplier:
Installing Python interpreter and three libraries
PYTHON INTERPRETER:
EXTERNAL LIBRARIES REQUIRED:
Install three libraries:
First open terminal window, then use these commands (assuming Python interpreter was installed in default directory, c:\Python27\):
cd c:\Python27 .\python -m pip install -U pip
.\python -m pip install pyserial==2.7
.\python -m pip install psutil
Installing GEODE software
Install GNSS/Survey logger, and Mini-GUNCO software, in two new directories
In terminal window:
cd c: mkdir HOVERCRAFT_GPS_2022
mkdir HOVERCRAFT_GUNCO_2022
Download:
- gunco-ver4-2022-07-13.py to HOVERCRAFT_GUNCO_2022
- gunco.ini to HOVERCRAFT_GUNCO_2022
- hovercraft-GNSS-ver3-2020-07-13.py to HOVERCRAFT_GPS_2022
Run the programs, in separate terminal windows:
Terminal window #1:
cd c:\HOVERCRAFT_GPS_2022
c:\python27\python .\hovercraft-GNSS-ver3-2020-07-13.py
Terminal window #2:
cd c:\HOVERCRAFT_GUNCO_2022
c:\python27\python .\gunco-ver4-2022-07-13.py
Screenshot
13 July, 2022: Three programs operating on WIN11 laptop:
(a) GNSS Distributor/Survey logger;
(b) Mini-GUNCO program;
(c) GEODE program.
Red arrow marks how Mini-Gunco program exports serial RS232 Shotpoint event data, which are captured by GEODE program (using separate COM-port). The event data string looks like NMEA telegram, starting with "$PUIBNAV", where means P="Proprietary", UIB="Universitetet i Bergen", and NAV="Navigation data". Click to enlarge.
SURVEY 2020
Laptops, 2x
- Mfr: Dell
- Model: Latitude D630
- OS: Win XP
- Software updates, May 2020:
GNSS units
| Navilock NL-8004U USB 2.0 GNSS Receiver
| 
|
|
Time stamping of airgun firing

- Remote Trigger Module 3, or RTM3, made by Seismic Source Company
- Ethernet: The RTM3 has a fixed IP and not a DHCP server. If the RTM has a serial number of 171 the IP address will be, 10.0.1.71. The computer should be set to 10.0.0.101. This link shows a video on setting up the computer IP address: https://www.youtube.com/channel/UCWszOSFMYMt20E-d2CD4xvQ
- Display: The "1" is the GPS indicator value from the NMEA string, $GPGGA, that is being received by the RTM3 and sent by the GPS receiver. The "P" means that the RTM3 is receiving the PPS from the GPS receiver. The "T:OK" means the RTM3 is time synchronized with the GPS receiver’s NMEA messages and PPS.
| 
|
Under consideration: https://verif-i.com/product/gps-sync/
GEODE seismic recorder
Hardware
- Trigger Interface cable: Item: 0026960-10 "CBL ASSY, TRIGGER (BNC TO 3-PIN) CO: SN030437
Software
USB to serial adapters

- 1-port serial
- Manufacturer: ST Labs
| 
|
SURVEYS 2008 - 2019
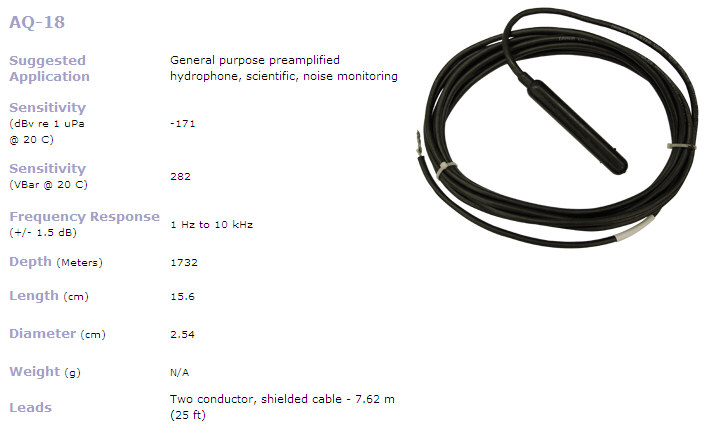
Single hydrophone
We have been using:
Splicing of hydrophone cable
Hydrophones are normally ordered unterminated. In order to splice the hydrophone cable to a suitable underwater pigtail cable (which is delivered with one connector; the other side is open) an inline cable splicing kit must be used:
Norwegian suppliers:
Interface between hydrophone AQ-18 / 6 ch streamer and GEODE recording system
Click to see large version:
") Interface between Teledyne AQ-18 Hydrophone / 6 channel mini-streamer and Geode Recording system - click to see large version. Interface between Teledyne AQ-18 Hydrophone / 6 channel mini-streamer and Geode Recording system - click to see large version.Recommended AQ-18 decoupling and wiring.
The recommended decoupling is done in the interface box shown below. The interface is also furnished with a DC/DC-converter in order to provide a clean 12 Vdc power source for the hydrophone.
 Teledyne hydrophone AQ-18 interface box (click to enlarge). Teledyne hydrophone AQ-18 interface box (click to enlarge)..") 6 channel mini-streamer terminals, Geode recording cable (click to enlarge). 6 channel mini-streamer terminals, Geode recording cable (click to enlarge).Mini-streamer, 6 channels
Mini-streamer layout.
- Mfr: SigFrance
- Channels: 6
- Model: SIG 16.6x4.46
- S/N: 08044
- Date: 04/2008
- Hydrophone elements:
- Sensitivity: -90 dB re 1 V/uBar, +/- 1 dB
- Frequency response: Flat +/- 1 dB over the frequency range 10 to 1000 Hz
- Max operating depth: 80 m
- Capacitance: 18.0 +/- 1.0 nF @ 20 deg C and 1 kHz
- Active section:
- Length: 46 m
- Diameter: Inside Ø=25 mm, outside Ø=30.5 mm
- Density: 1.05
- Oil: 880
- Number of channels: 6
- Number of hydrophones per channel: 4
- Leadin cable:
- Length: 75 m
- Breaking strength: 500 Kg
- Preamplifier:
- Number of channels: 6
- Gain: 32 dB (=40x)
- Bandwidth: 2 - 3000 Hz
- Maximum voltage output: 12 V p-p
- Current consumption: < 2 mA
Seismic source
Recording
Geometrics Geode
GPS for time- and position stamping of data
- GPS: Garmin GPS 35-HVS
GPS has been configured to only output GPGGA NMEA telegram. Link to configuration program and User Manual. The GEODE has a small quirk in that you cannot specify the NMEA telegram to record alongside seismic data. So to ensure consistency in time/positional logging the attached GPS should output only one type of NMEA telegram.
Configuration for use with UBS based GPS
If a USB based GPS should be used, there is a problem as the Geode software only accepts serial port in the Keep('COM1') to Keep('COM4') range, see screenshot below.
The USB based GPS will normally be assigned to a COM number in a higher range. So a remapping of COM port assignment need to be done.
 Geode software serial setup menu. Geode software serial setup menu.Default COM port assignment and NMEA telegram output from ordinary USB/GPS shown below.
 Data from USB/GPS, default selection of telegrams. Data from USB/GPS, default selection of telegrams.Re-assigning COM port to fall within the 1-4 range is accomplished from Control Panel -> Hardware -> Comport -> (properties of USB/GPS port)
In advanced settings, you can force comport setting to an available number within the 1-4 range that Geode software accepts.
Backup recording system
Ref. notes on this page.
MISC

A 20 inch3 Bolt airgun. Click to enlarge.
| 
Air bubbles from a shot. Click to enlarge.
|
|






")

.")

{kind=link}
{kind=link}